Nissan Quest E52. Manual - part 142
AV
SYSTEM
AV-447
< SYSTEM DESCRIPTION >
[BOSE AUDIO WITH NAVIGATION]
C
D
E
F
G
H
I
J
K
L
M
B
A
O
P
The name MULTIFUNCTION SWITCH indicates the integration of PRESET SWITCH and MULTIFUNCTION
SWITCH virtually.
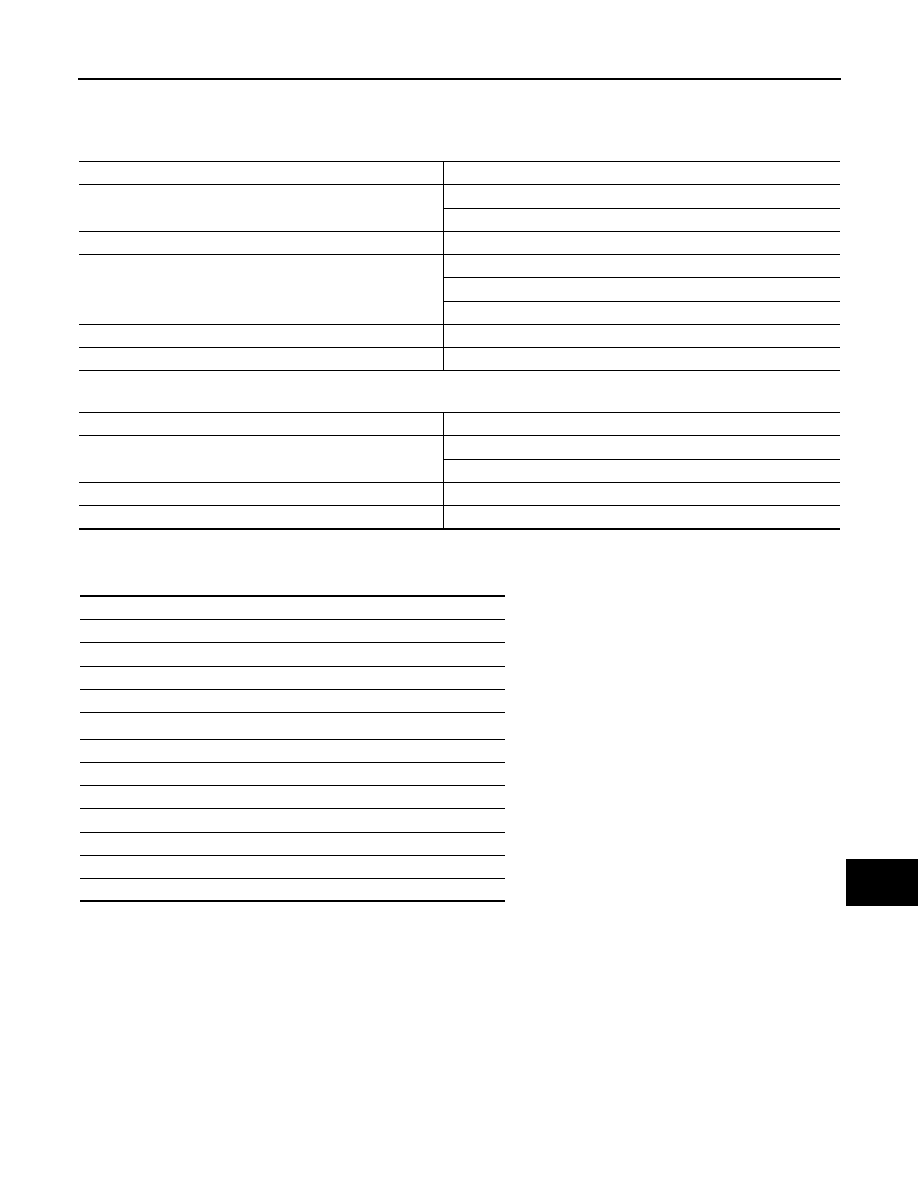
AV Control Unit Input Signal (CAN Communication)
Around View Monitor Control Unit Input Signal (CAN Communication)
DESCRIPTION
Multi AV system means that the following systems are integrated.
COMMUNICATION SIGNAL
• AV control unit function by transmitting/receiving data one by one with each unit (slave unit) that configures
them completely as a master unit by connecting between units that configure MULTI AV system with two AV
communication lines (H, L).
• Two AV communication lines (H, L) adopt a twisted pair line that is resistant to noise.
• AV control unit is connected with front display unit and serial communication, and it transmits the required
signal of display and display control and receives the response signal from front display unit.
CAN COMMUNICATION
• AV control unit is connected by CAN communication, and it receives data signal from ECM and combination
meter. It computes and displays fuel economy information value with the obtained information.
• The AV control unit, which has the vehicle setting function, transmits and receives data on vehicle setting
condition via CAN communication with the BCM.
Transmit unit
Signal name
ECM
Engine status signal
Fuel consumption monitor signal
Steering angle sensor
Steering angle sensor signal
Combination meter
Vehicle speed signal
Distance to empty signal
Fuel level low warning signal
BCM
System setting signal
Around view monitor control unit
View change signal
Transmit unit
Signal name
AV control unit
Camera switch signal
Camera OFF signal
Steering angle sensor
Steering angle sensor signal
ABS actuator and electric unit (control unit)
Vehicle speed signal
FUNCTION NAME
Navigation system function
Audio function
DVD play function
Mobile entertainment system
Bluetooth
®
hands-free phone function
Auxiliary input function
USB connection function
Voice recognition function
Touch panel function
Around view monitor function
Vehicle information function
Auto Light adjustment system