содержание .. 591 592 593 594 ..
Механизмы в современной технике (Артоболевский) - часть 593
3346
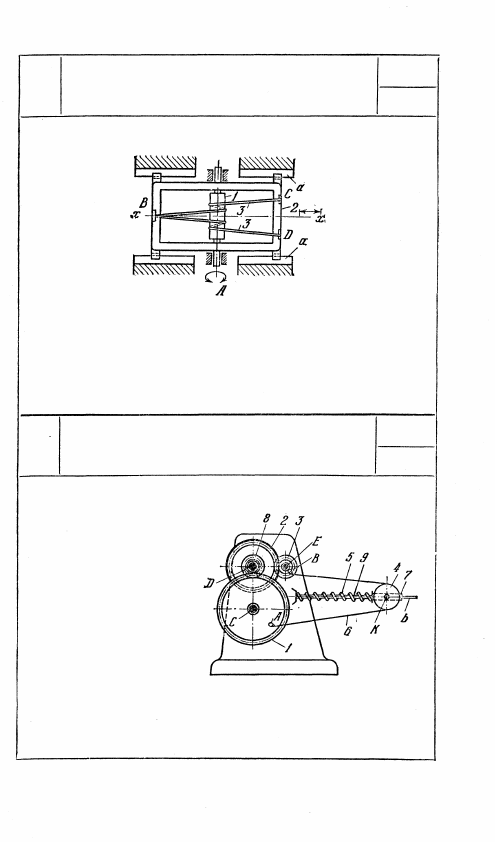
МЕХАНИЗМ С ГИБКИМИ ЗВЕНЬЯМИ
ДЛЯ ПРЯМОЛИНЕЙНОГО
ПЕРЕМЕЩЕНИЯ ПОЛЗУНА
СГ
М
Круглый цилиндрический барабан 1 вращается вокруг непод-
вижной оси А. Гибкие звенья 3, охватывающие барабан, закреп-
лены на ползуне 2 в точках В, С и D. При вращении барабана 1
ползун 2 движется по направляющим а вдоль оси х — х.
3347
МЕХАНИЗМ ДЛЯ ПЕРЕМЕЩЕНИЯ
ПОЛЗУНА С ГИБКИМ ЗВЕНОМ
И ЗУБЧАТЫМ ПРИВОДОМ
СГ
М
Зубчатое колесо 1 через
промежуточное колесо 2
сообщает вращение коле-
су 3. Пружина 5 служит
для натягивания гибкого
звена 6, закрепленного
в точках А и В на зуб-
чатых колесах 1 и 3.
Гибкое звено перекинуто
через ролик 4, шарнирно
соединенный с ползуном 7,
который скользит по
штанге 9, жестко сидящей на станине. При вращении колеса 1
ползун 7 движется вдоль направляющей b.
363