содержание .. 355 356 357 358 ..
Механизмы в современной технике (Артоболевский) - часть 357
13. МЕХАНИЗМЫ ИЗМЕРИТЕЛЬНЫХ
И ИСПЫТАТЕЛЬНЫХ УСТРОЙСТВ (2132—2135)
2132
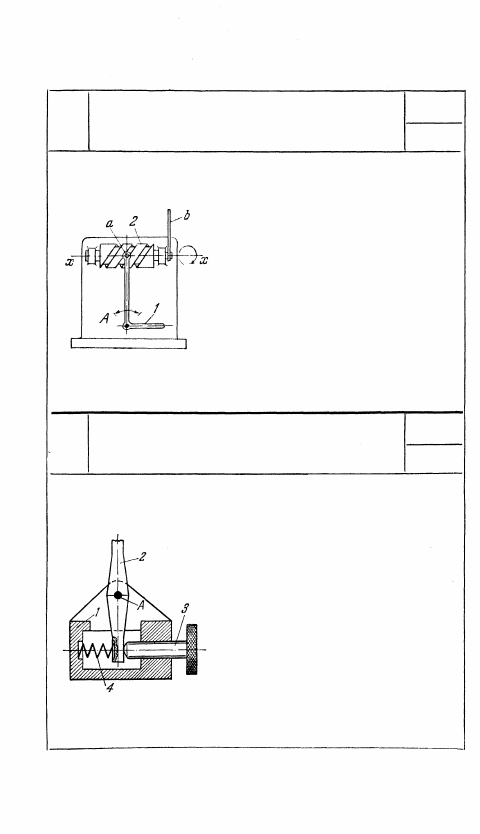
ВИНТО-РЫЧАЖНЫЙ
МЕХАНИЗМ ИНДИКАТОРА
ВР
Звено 2, вращающееся вокруг непод-
вижной оси х—x, имеет винтовую
резьбу с большим углом наклона.
Звено 1, вращающееся вокруг непо-
движной оси A, имеет палец а, вхо-
дящий в прорезь резьбы. При враще-
нии рычага 1 палец а, входящий в
резьбу звена 2, поворачивает его, а
с ним и стрелку b индикатора.
2133
ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ
ДЛЯ УСТАНОВКИ СТРЕЛКИ
ВР
Звено 2, вращающееся вокруг непо-
движной оси A, жестко связано со
стрелкой регистрирующего прибора.
Звено З, входящее в винтовую пару
с неподвижным звеном 1, своим кон-
цом упирается в хвостовик звена 2.
Пружина 4 обеспечивает силовое за-
мыкание механизма. Установка звена
2 в требуемом положении осуществ-
ляется поворотом звена 3.
396
И
И