содержание .. 303 304 305 306 ..
Механизмы в современной технике (Артоболевский) - часть 305
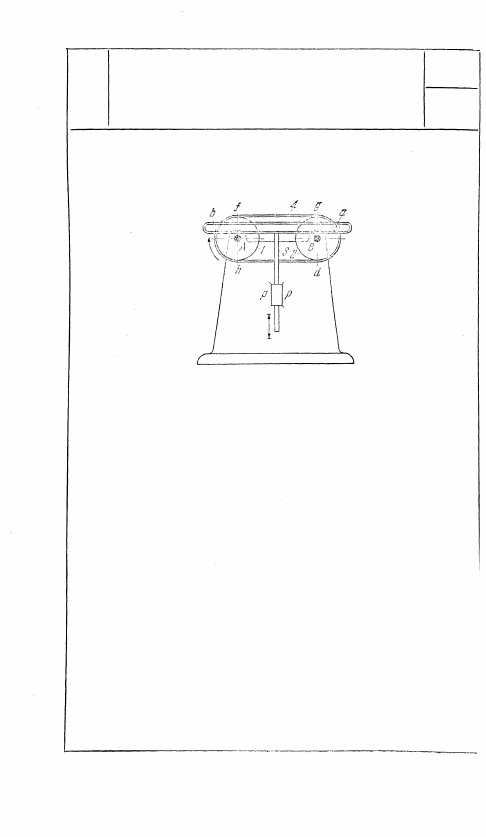
1827
Длины звеньев механизма удов-
летворяют условию r
1
= r
2
, где
r
1
и r
2
— радиусы шкивов 1 и 2.
Ось прорези в ползуне 3 па-
раллельна направлению АВ и
образует угол 90° с осью на-
правляющих р — р. Шкив 1,
вращающийся вокруг непод-
вижной оси A, гибким звеном 4
приводит во вращение вокруг
неподвижной оси В шкив 2. Па-
лец а гибкого звена 4 сколь-
зит в прорези b ползуна 3,
скользящего в неподвижных на-
правляющих р — р. При вра-
щении шкива 1 вокруг оси А
ползун 3 движется возвратно-
поступательно в направ-
ляющих р — р. При прохожде-
нии пальцем а участков fg и
dh его пути ползун 3 имеет ос-
тановки в крайних своих поло-
жениях.
188
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
АРТОБОЛЕВСКОГО С ГИБКИМ ЗВЕНОМ
С ДВУМЯ ОСТАНОВКАМИ
ВЫХОДНОГО ЗВЕНА
РГ
О