содержание .. 237 238 239 240 ..
Механизмы в современной технике (Артоболевский) - часть 239
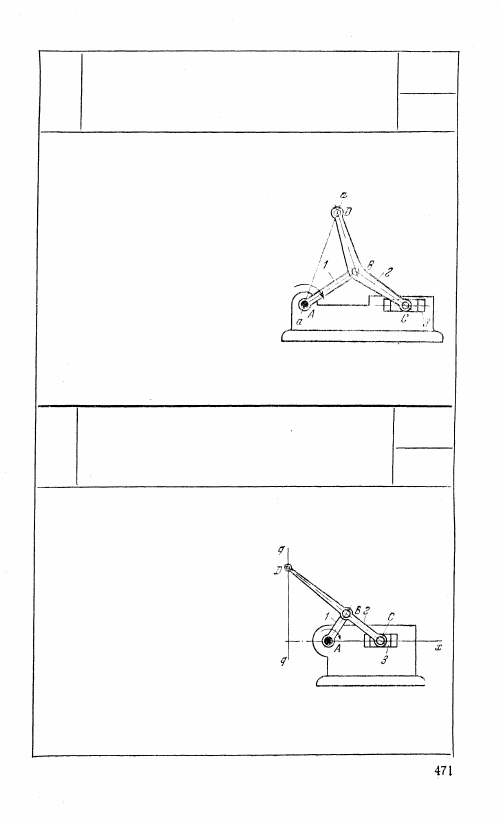
1466
КРИВОШИПНО-ПОЛЗУННЫЙ
ЧЕТЫРЕХЗВЕННЫЙ
ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ
МЕХАНИЗМ СКОТТ РАССЕЛА
КП
НИ
Длины звеньев кривошипно-пол-
зунного механизма AВС удовлетво-
ряют условию A B = B C = B D .
При вращении звена 1 вокруг не-
подвижной оси А точка D звена 2
описывает прямолинейную траек-
торию Аа.
1467
КРИВОШИПНО-ПОЛЗУННЫЙ
ЧЕТЫРЕХЗВЕННЫЙ
ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ
МЕХАНИЗМ
КП
НИ
Длины звеньев кривошипно-пол-
зунного механизма ABC удовлет-
воряют условиям: ВС = 1,37AB и
BD = 2,27 АВ. При вращении кри-
вошипа 1 вокруг неподвижной оси
А точка D шатуна 2 описывает тра-
екторию на некотором участке,
близкую к прямой q — q и перпен-
дикулярную к оси Ах движения
ползуна 3.