содержание .. 232 233 234 235 ..
Механизмы в современной технике (Артоболевский) - часть 234
1431
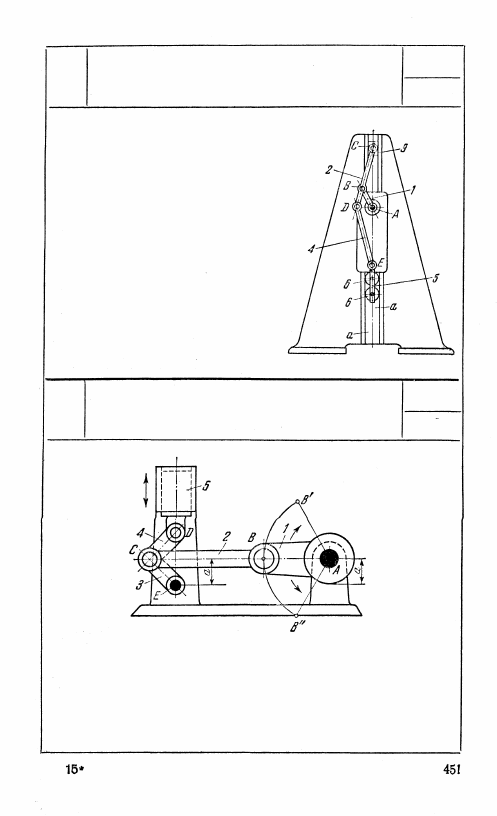
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
С ПРИСОЕДИНЕННЫМ ШАТУНОМ
И ПОЛЗУНОМ
кп
ш
К шатуну 2 кривошипно-ползунного
механизма ABC в точке D присоединен
шатун 4, приводящий в движение зве-
но 5, выполненное в виде тележки с ко-
лесами 6, перекатывающимися по на-
правляющим а — а. При положениях
ползуна 3, близких к верхнему пре-
дельному положению, участок траекто-
рии точки D может быть приближенно
заменен дугой окружности радиуса DE.
При вращении кривошипа 1 ползун 3
и тележка 5 движутся возвратно-посту-
пательно. Продолжительность пребы-
в а н и я вблизи верхнего предельного
положения механизма у тележки 5
больше, чем у ползуна 3.
1432
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
С УДВОЕННЫМ ХОДОМ ПОЛЗУНА
КП
Ш
Длины звеньев механизма удовлетворяют условию ЕС = CD. Звено 1
имеет возвратно-качательное движение в пределах угла В'АВ". Кача-
тельное движение звена 1 преобразуется посредством звеньев 2, 3, 4
в возвратно-поступательное движение ползуна 5. За одно полное кача-
ние рычага 1 ползун 5 совершает два полных цикла движения. Путь s,
проходимый точкой D ползуна из крайнего нижнего положения, ука-
занного на чертеже, в крайнее верхнее положение, равен
s = 2 (CD — a).