содержание .. 231 232 233 234 ..
Механизмы в современной технике (Артоболевский) - часть 233
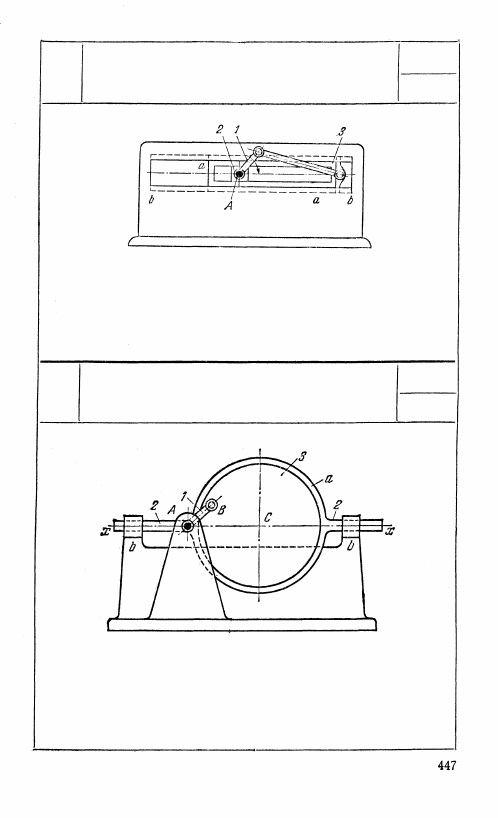
1423
КРИ ВОШИП НО- ПОЛЗУНН ЫЙ МЕХАНИЗМ
С ПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ
КП
Ч
Кривошип 1 вращается вокруг неподвижной оси А. Ползун 3,
скользящий в неподвижной направляющей b — b, имеет прорезь
а — а, скользящую по неподвижному ползуну 2. При вращении
кривошипа 1 направляющая 3 совершает возвратно-поступатель-
ное движение в горизонтальном направлении.
1424
КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ
С РАСШИРЕННОЙ ЦАПФОЙ
КП
Ч
Звено 2 выполнено в форме втулки а, охватывающей диск 3
с центром в точке С. При вращении кривошипа 1 звено 2 движется
возвратно-поступательно вдоль оси х — x в неподвижных на-
правляющих b — b. Механизм эквивалентен кривошипно-пол-
зунному механизму AВС.