содержание .. 152 153 154 155 ..
Механизмы в современной технике (Артоболевский) - часть 154
1032
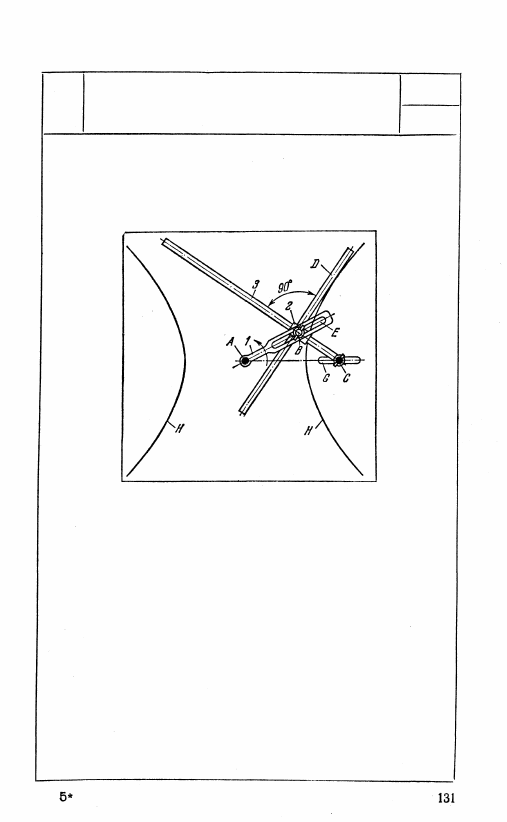
КУЛИСНО-РЫЧАЖНЫЙ
МЕХАНИЗМ АРТОБОЛЕВСКОГО
ДЛЯ ОГИБАНИЯ ГИПЕРБОЛ
КР
ВК
Длины звеньев удовлетворяют условиям АС >
> АВ. Кривошип 1 длины АВ вращается во-
круг неподвижной оси А. Кулиса 3 вращается
вокруг неподвижной оси С. Ползун 2, сколь-
зящий по оси кулисы 3, несет на себе планку D.
При указанном выше условии при вращении
кривошипа 1, длина А В которого регулиру-
ется перестановкой шарнира В в прорези, план-
ка D, соединенная с ползуном 2, огибает гипер-
болу H. Расстояние между вершинами гипер-
болы равно двойной длине кривошипа АВ.
Центр шарнира С помещается в одном из фоку-
сов гиперболы. Установкой шарниров В и С
в прорезях Е и С можно получать гиперболы
требуемых параметров,