содержание .. 15 16 17 18 ..
Механизмы в современной технике (Артоболевский) - часть 17
110
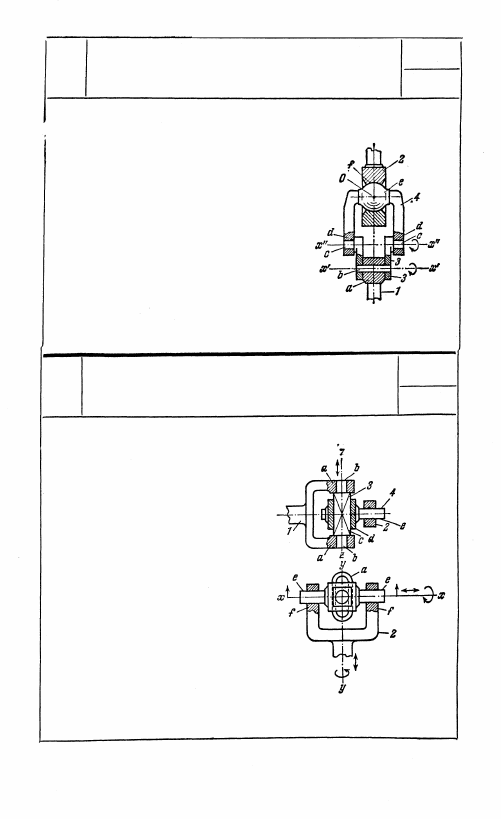
ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ
С БОЧКООБРАЗНОЙ ГОЛОВКОЙ
ЭМ
ПС
Звено 1 имеет втулку a, охватывающую
валик b звена 3. Звено 3 имеет пальцы с,
входящие в проушины d звена 4.
Звено 4 имеет бочкообразную головку е,
входящую в шаровой пояс f звена 2.
Движение звена 1 относительно звена 2
сводится к пяти вращательным движе-
ниям вокруг трех взаимно перпенди-
кулярных осей, пересекающихся в точ-
ке О, и вокруг двух параллельных
осей х' — х' и х" — х".
111
ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ
С ОВАЛООБРАЗНЫМИ НАПРАВЛЯЮЩИМИ
ЭМ
ПС
Звено 1 имеет овалообразные на-
правляющие а, в которых скользят
и вращаются круглые пальцы b
звена 3. Звено 3 имеет призматиче-
скую направляющую с, по которой
скользит ползун d звена 4. Звено 4
имеет цилиндрические направляю-
щие е, охватываемые проушинами f
звена 2. Движение звена 1 относи-
тельно звена 2 сводится к двум
вращательным движениям вокруг
взаимно перпендикулярных осей
х — хиу — у и трем поступатель-
ным движениям вдоль взаимно пер-
пендикулярных осей х — х, у — у
и z — z.
71