Infiniti I35 (A33). Manual - part 460
Possible cause
Drive condition
Service procedure
Opera-
tion
Driving immediately after starting engine.
The gyro (angular velocity sensor)
needs about 15 seconds after the
engine is started to precisely sense
the angular velocity.
Directional sensing errors will occur
if the vehicle is moved immediately
after starting the engine. The posi-
tion marker may indicate inaccurate
position.
Wait a few moments
between starting the engine
and actually driving the
vehicle.
Continuous driving for long distances (non-stop)
When the vehicle is driven continu-
ously without stopping over a long
distance, errors in directional sens-
ing may occur. The position marker
may indicate inaccurate position.
Stop the vehicle. Perform
“Speed Calibration” (EL-422).
Rough or violent driving
Wheel spinning (peeling out) or simi-
lar rough driving techniques can
adversely affect sensing accuracy.
The position marker may indicate
inaccurate position.
If the position marker does
not move to the correct posi-
tion even after the vehicle
has been driven approxi-
mately 10 km (6 miles), per-
form “Adjust Current Loca-
tion” MODE (EL-429).
Posi-
tional
calibra-
tion
proce-
dures
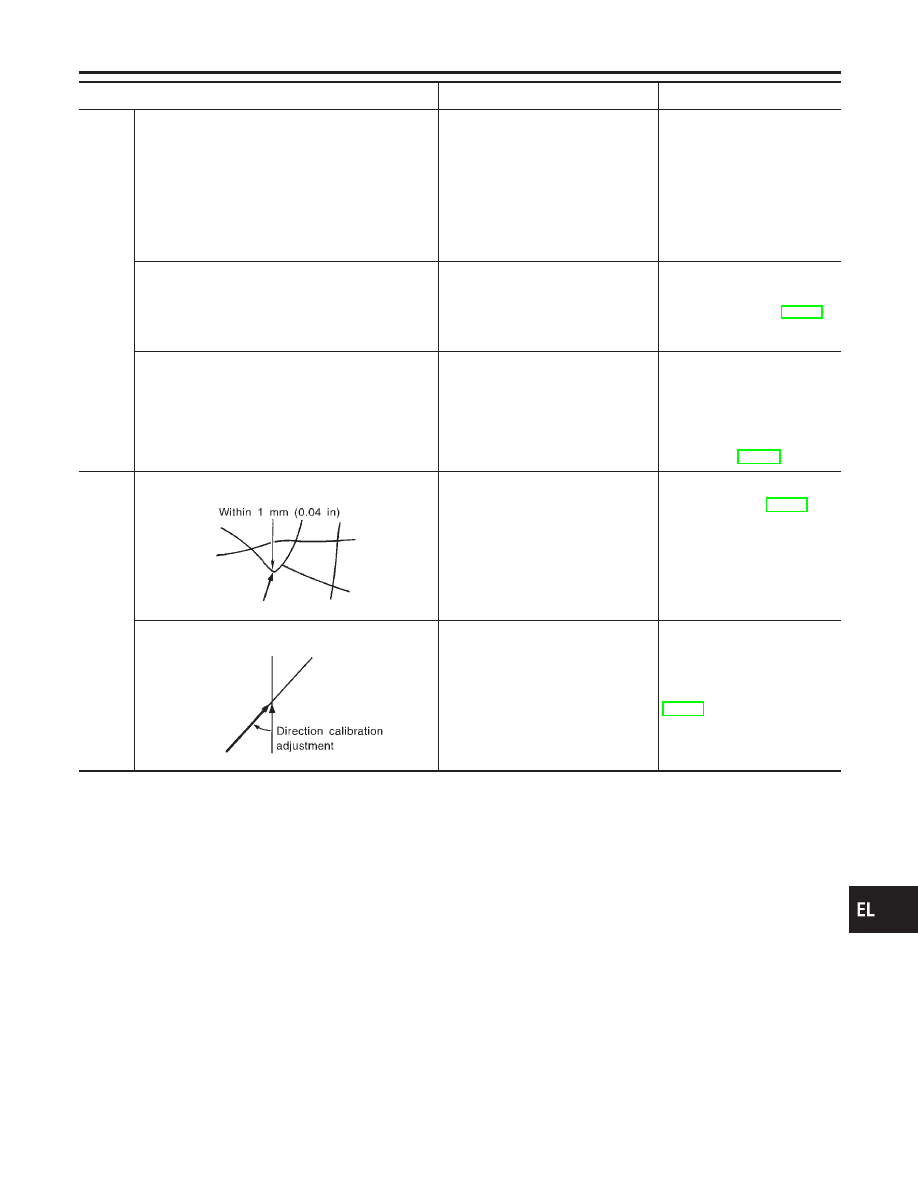
Positional calibration precision
SEL701V
If current vehicle location is roughly
set, the system may be unable to
locate the road that the vehicle is
traveling on. (This is especially true
in an area where there are many
roads.)
Perform “Adjust Current
Location” MODE (EL-429)
within a precision standard of
1 mm (0.04 in) on the dis-
play.
NOTE:
During calibration, use the
most detailed map possible.
Position calibration direction
SEL702V
When calibrating the position, check
the vehicle direction. If the vehicle
direction is not correct, subsequent
precision of current location will be
affected.
Perform “Adjust Current
Location” MODE, refer to
EL-429.
GI
MA
EM
LC
EC
FE
AT
AX
SU
BR
ST
RS
BT
HA
SC
IDX
NAVIGATION SYSTEM
This Condition Is Not Abnormal (Cont’d)
EL-441