содержание .. 130 131 132 133 ..
Nissan Murano. Manual - part 132
AV-306
< SYSTEM DESCRIPTION >
[BOSE AUDIO WITH NAVIGATION]
SYSTEM
SYSTEM
MULTI AV SYSTEM
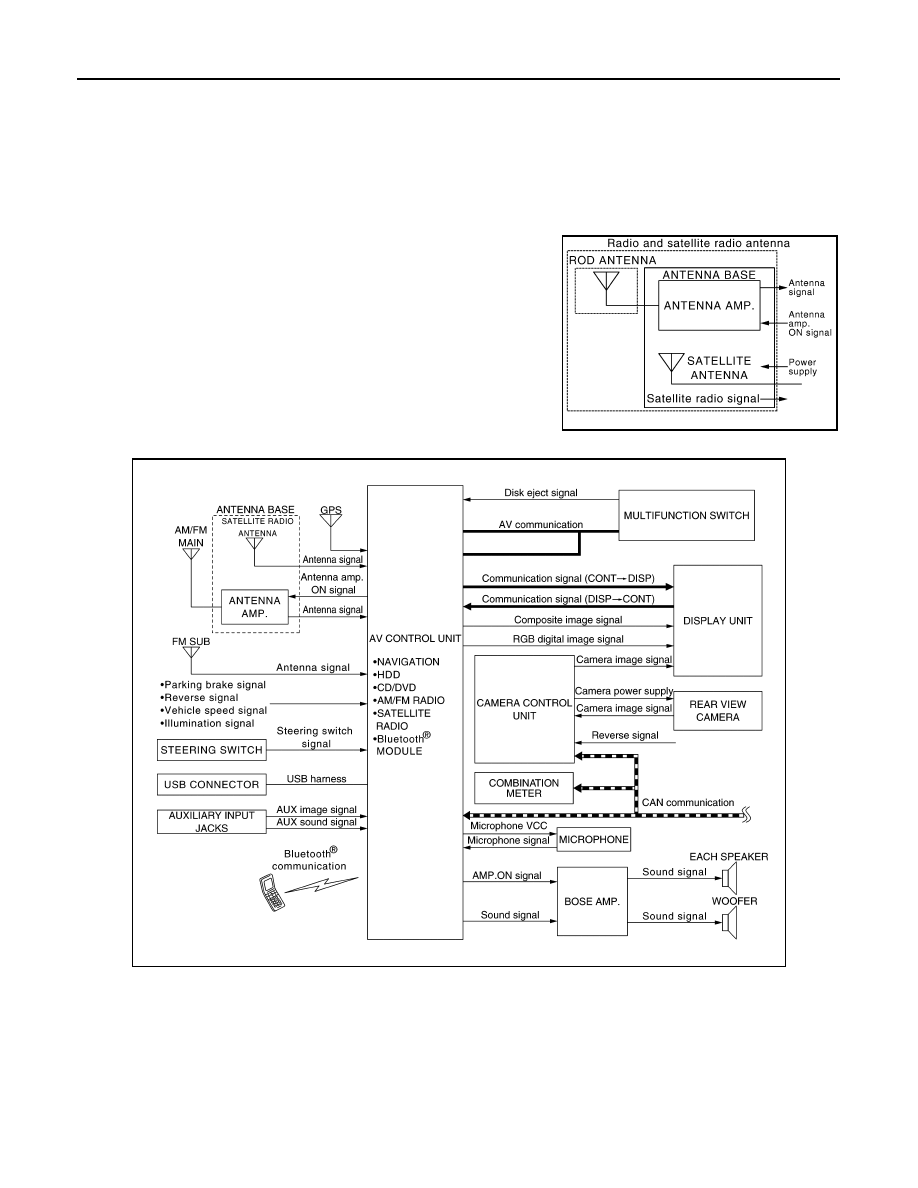
MULTI AV SYSTEM : System Diagram
INFOID:0000000009721845
NOTE:
• The name MULTIFUNCTION SWITCH indicates the integration of PRESET SWITCH and MULTIFUNCTION
SWITCH virtually.
• An antenna base integrated with radio antenna amp. and satellite
radio antenna is adopted.
MODELS WITH LDW AND BSW
JSNIA1062GB
JSNIA5366GB