Content .. 1689 1690 1691 1692 ..
Mitsubishi Galant (2004+). Manual - part 1691
OPERATION
CONTROLLER AREA NETWORK (CAN)
54C-3
OPERATION
M2542000300045
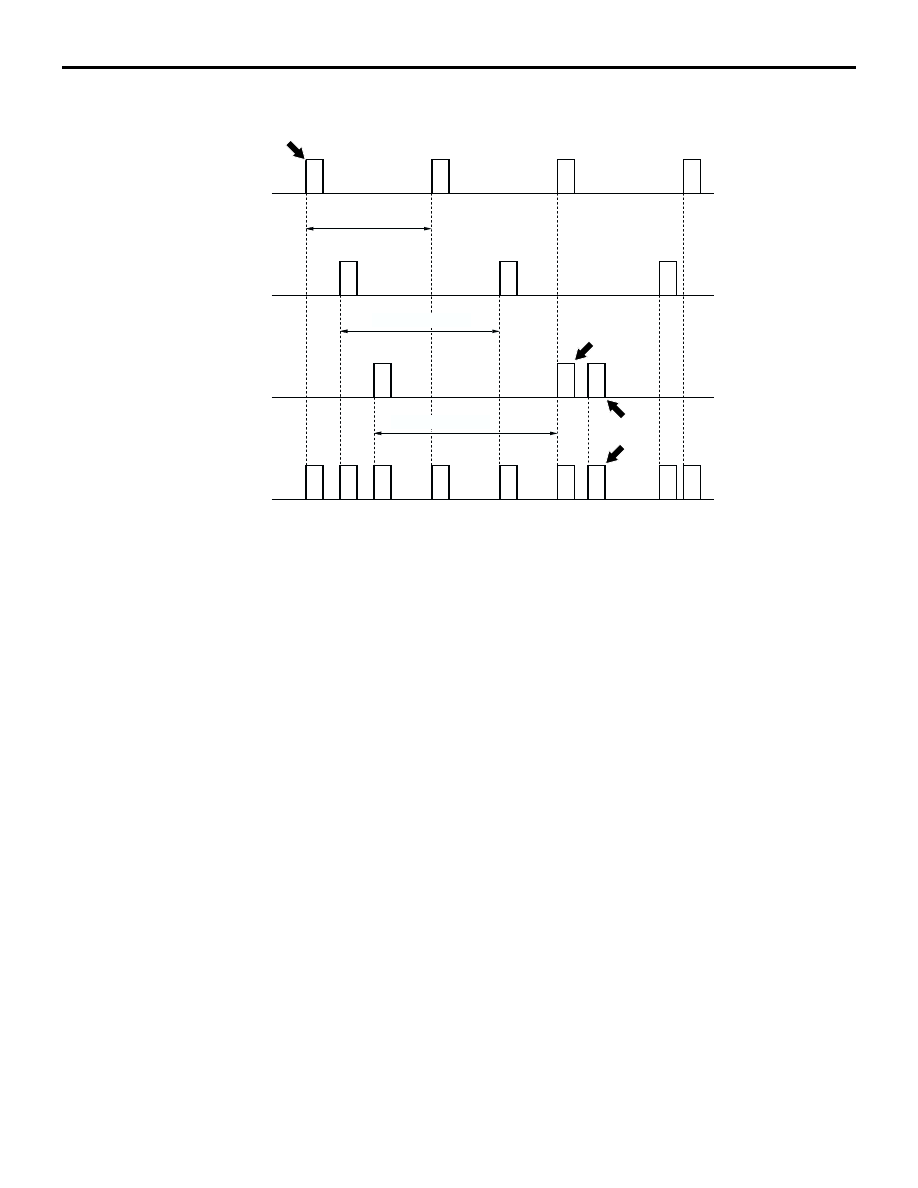
The CAN communication system is described below.
•
Data from each sensor is transmitted periodically
as data frames over the CAN bus (periodically
sent data). For further details, consult the Data
Frame section.
•
The multiple ECUs requiring data over the CAN
bus simultaneously receive data.
•
Transmission intervals from 10 to 1000 msec can
be set, depending on the necessity of the data
sent.
NOTE: In the figure above, the data frame A is
transmitted in "a" intervals, while the data frames
B and C are transmitted at intervals "b" and "c,"
respectively.
•
A single ECU transmits multiple data frames.
•
In the case of data collision (if multiple ECUs
transmit at roughly the same moment), mediation
occurs so that multiple data frames are not trans-
mitted simultaneously. For further details, consult
the Mediation section .
•
Transmission is performed on the basis of electric
potential difference, not through voltage as in
conventional systems. For further details, consult
the section on CAN bus voltage transformation.
•
Various kinds of error detection and recovery pro-
cessing are performed to secure a greater level
of reliability. For further details, consult the sec-
tions on error detection and system recovery.
•
For further details on the main communication
signals, consult the table on
.
MEDIATION
Because each ECU transmits data independently
over the CAN bus, there are cases of data collision
when multiple data frames that ECUs attempt to
transmit simultaneously (if multiple ECUs transmit at
roughly the same moment). When this happens, pro-
cessing of the ECUs attempting transmission is prior-
itized as follows:
1. Data frames with high-priority ID codes are
granted transmission priority.
2. Transmission of low-priority data is held at the
issuing ECUs until the bus clears (when no trans-
mission data exists on the CAN bus).
NOTE: In the holding state, new data (as the data
frame content) will be sent after refreshing at
fixed periods.
3. When the bus clears, the data frames are sent
again.
NOTE: Because there is ample leeway on the CAN
bus, there is no instance when data frames cannot
be sent.
.
AC206267
ECU-1
A
A
A
A
B
B
B
C
C
A
B
C
C
C
B
B
A
A
A
ECU-2
ECU-3
CAN BUS
AC206267AB
DATA FRAME
INTERVAL a
INTERVAL b
INTERVAL c
SENT
AGAIN
HELD
COMMUNICATION
BY MEDIATION