содержание .. 17 18 19 20 ..
Электровоз 2ЭС4К. Руководство по эксплуатации - часть 19
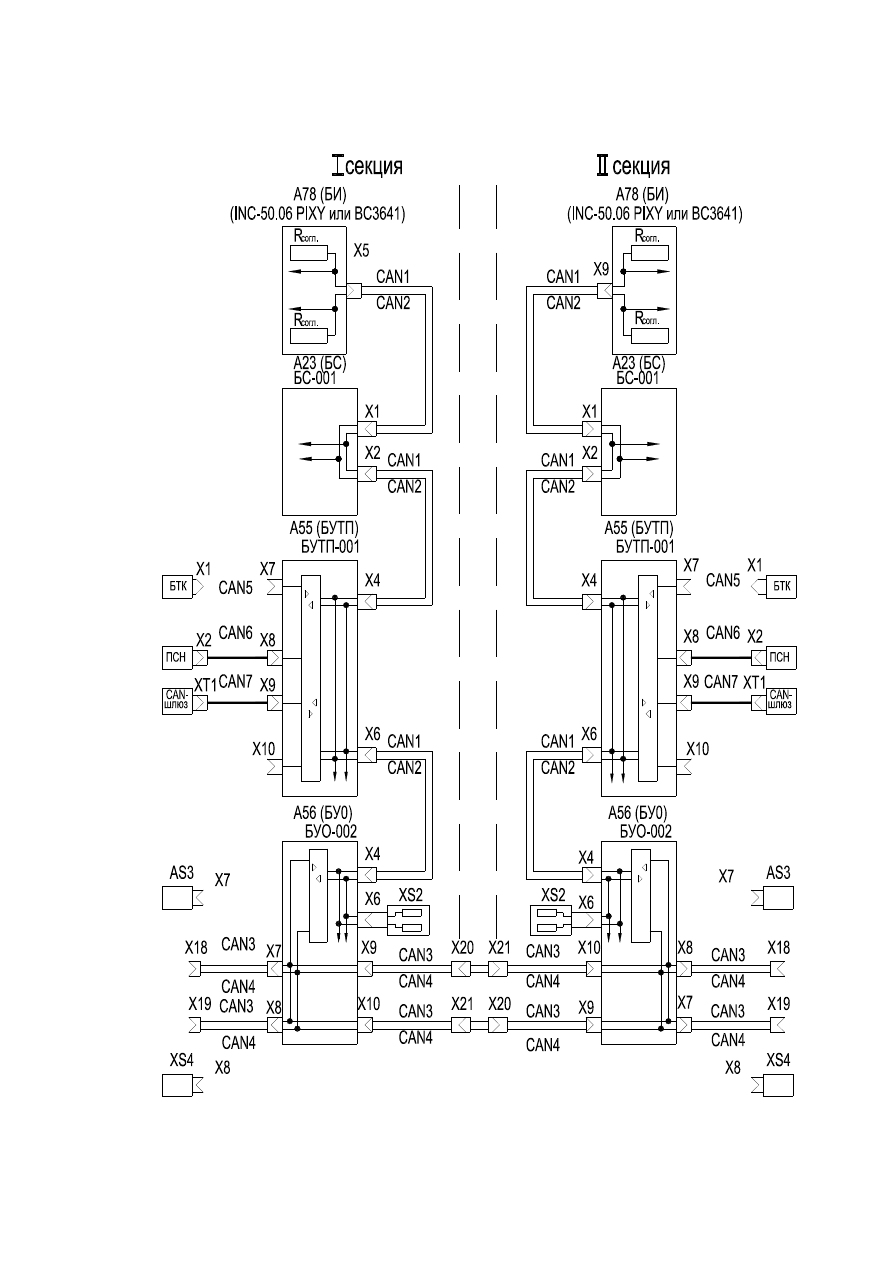
Рисунок 1 - Структурная схема МСУД-001 электровоза 2ЭС4К
6
Главная Учебники - Разные Электровоз 2ЭС4К. Руководство по эксплуатаци
поиск по сайту правообладателям
|
|
|
содержание .. 17 18 19 20 ..
Рисунок 1 - Структурная схема МСУД-001 электровоза 2ЭС4К 6 |