содержание .. 70 71 72 73 ..
Инверторы серии FRENIC-AQUA. Руководство пользователя (2012 год) - часть 72
6-296
J521
J522
J524
Внешнее
ПИД
-
управление
1 (
Выбор
вывода
аварии
)
(
Авария
по
верхнему
уровню
(AH))
(
Авария
по
нижнему
уровню
(AL))
J621
(
Внешнее
ПИД
-
управление
2 (
Выбор
вывода
аварии
))
J622
(
Внешнее
ПИД
-
управление
2 (
Авария
по
верхнему
уровню
(AH))
J624
(
Внешнее
ПИД
-
управление
2 (
Авария
по
нижнему
уровню
(AL))
J671
(
Внешнее
ПИД
-
управление
3 (
Выбор
вывода
аварии
))
J672
(
Внешнее
ПИД
-
управление
3 (
Авария
по
верхнему
уровню
(AH))
J674
(
Внешнее
ПИД
-
управление
3 (
Авария
по
нижнему
уровню
(AL))
Параметры
J521/J522/J524, J621/J622/J624, J671/J672/J674
определяют
два
типа
ава
-
рийных
сигналов
(
по
абсолютному
значению
и
отклонению
),
которые
инвертор
может
выводить
для
внешнего
ПИД
-
управления
1, 2
или
3,
соответственно
.
Для
использования
выхода
аварии
необходимо
с
помощью
параметров
с
E20
по
E24
и
E27
назначить
дискретные
сигналы
EPV1-ALM
,
EPV2-ALM
или
EPV3-ALM
любому
из
дискретных
выходов
.
Для
вывода
незначительной
аварии
следующие
дискретные
выходные
сигналы
могут
быть
извлечены
без
установки
незначительной
аварии
4
(H184).
Подробнее
о
незначительных
авариях
см
.
в
описании
параметров
с
H181
по
H184.
-
Внешнее
ПИД
-
управление
1:
EPV1-ALM
(E20 – E24
и
E27,
значение
= 214)
-
Внешнее
ПИД
-
управление
2:
EPV2-ALM
(E20 – E24
и
E27,
значение
= 224)
-
Внешнее
ПИД
-
управление
3:
EPV3-ALM
(E20 – E24
и
E27,
значение
= 234)
Параметры
J521/J621/J671
определяют
типы
выводимых
аварийных
сообщений
.
Па
-
раметры
J522/J622/J672
и
J524/J624/J674
определяют
верхний
и
нижний
пределы
для
вывода
аварийных
сообщений
,
соответственно
.
ПИД
-
управление
с
1
по
3 (
Выбор
типа
выводимой
аварии
) (J521, J621, J671)
Параметры
J521/J621/J671
определяютя
одно
из
следующих
аварийных
сообщений
.
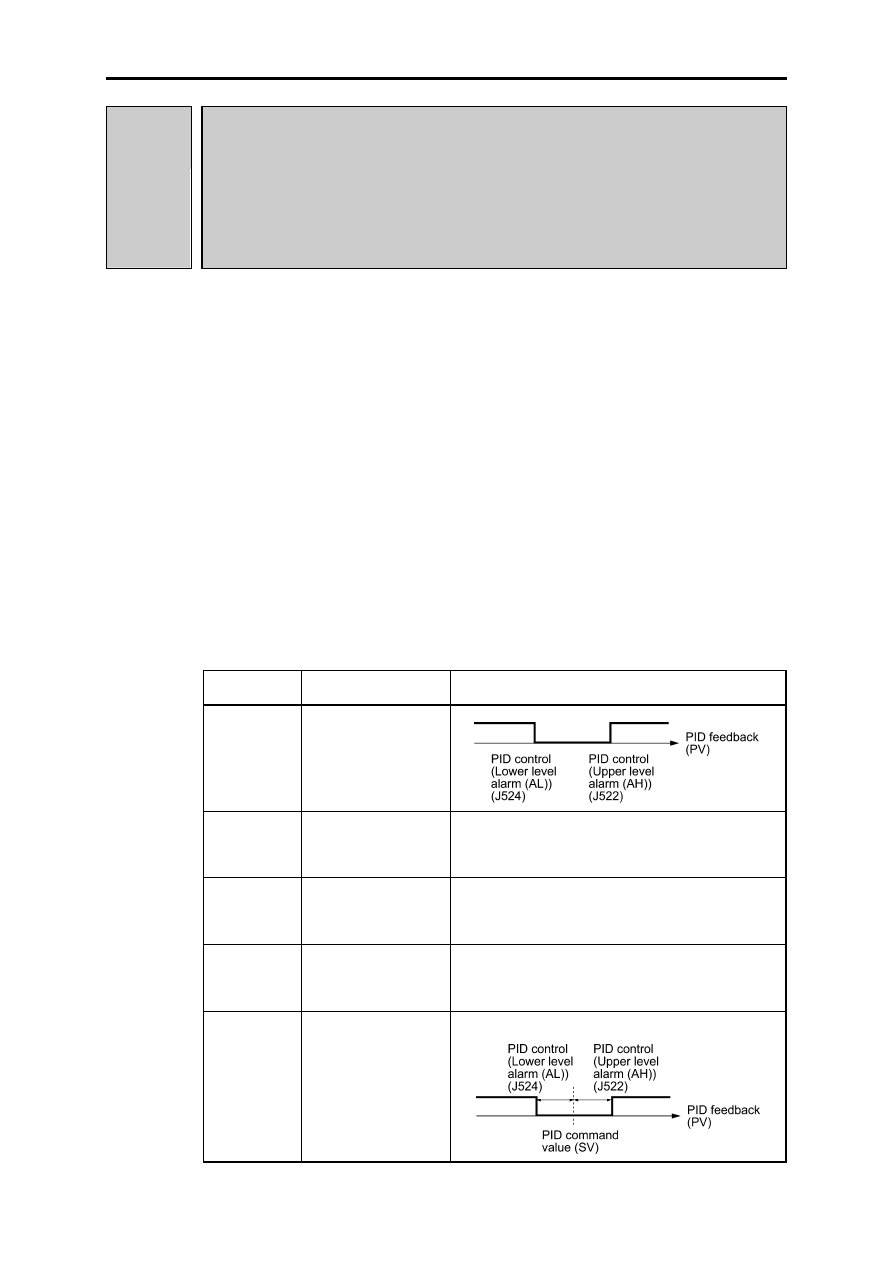
Значение
J521/J621/J671
Авария
Описание
0
Сообщение
по
аб
-
солютному
значе
-
нию
(PV)
Когда
PV < AL
или
AH < PV,
EPV1-ALM
–
ВКЛ
.
1
Сообщение
по
аб
-
солютному
значе
-
нию
(PV) (
с
удер
-
жанием
)
То
же
самое
(
с
удержанием
)
2
Сообщение
по
аб
-
солютному
значе
-
нию
(PV) (
с
защёл
-
кой
)
То
же
самое
(
с
защёлкой
)
3
Сообщение
по
аб
-
солютному
значе
-
нию
(PV) (
с
удер
-
жанием
и
защёлкой
)
То
же
самое
(
с
удержанием
и
защёлкой
)
4
Сообщение
по
от
-
клонению
(PV)
Когда
PV < SV - AL
или
SV + AH < PV,
EPV1-ALM
–
ВКЛ
.