содержание .. 650 651 652 653 ..
Механизмы в современной технике (Артоболевский) - часть 652
3646
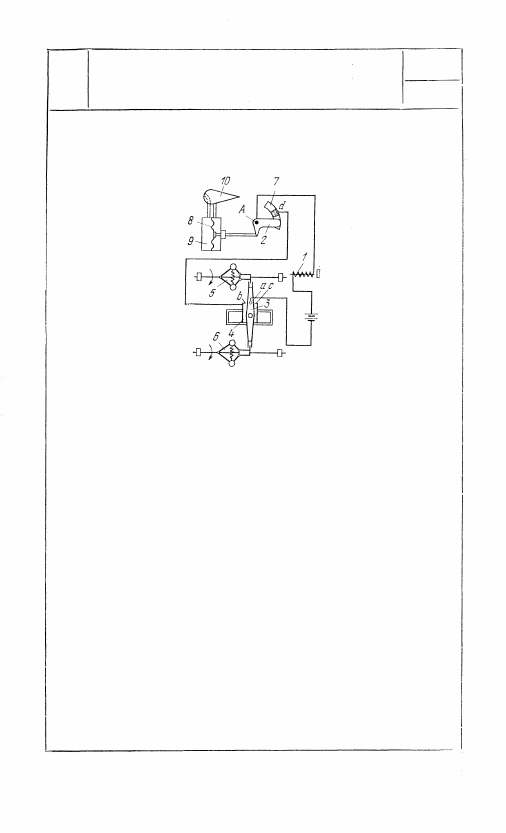
М Е Х А Н И З М С И Н Х Р О Н И З А Т О Р А
ТЯГИ ВИНТОВ
МНОГОМОТОРНОГО САМОЛЕТА
сэ
Рг
Источник питания соединен с контактом а и с
одним концом катушки электромагнита 1, другой
конец которой присоединен к оси А рычага 2.
Контакт а укреплен на рычаге 3, который за-
креплен на ползуне 4, несущем контакты b и с.
Рычаг 3 присоединен к муфтам центробежных ре-
гуляторов 5 и 6, приводимых во вращение соот-
ветствующими двигателями. Контакты b и с п р и -
соединены к контакту d на направляющей 7, по
которой скользит рычаг 2. Этот рычаг поворачи-
вается под влиянием прогиба мембраны 8, уста-
новленной в камере 9, в которую подводятся
статическое и динамическое давления воздуха из
трубки Пито 10. Динамическое давление воздуха
после старта самолета достаточно для включении
контакта d рычагом 2. При падении числа обо-
ротов одного из двигателей самолета рычаг 3
поворачивается и соединяется с одним из коп-
тактов b или с, по обмотке 1 проходит ток и од-
новременно выключается симметричный двига-
тель. Если число оборотов изменяется синхронно,
то рычаг 3 перемещается вместе с ползуном 4,
при этом контакт а не включается.
21.3