содержание .. 616 617 618 619 ..
Механизмы в современной технике (Артоболевский) - часть 618
3487
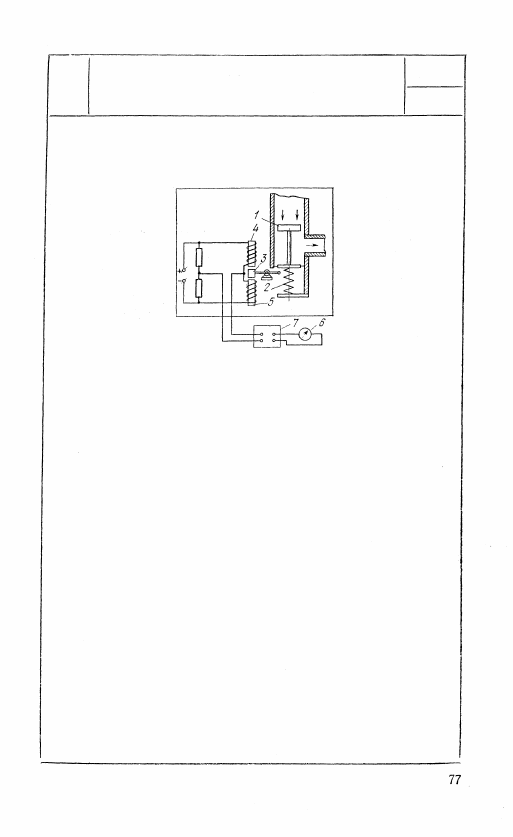
МЕХАНИЗМ РАСХОДОМЕРА
РЭ
И
В поток жидкости, расход ко-
торой должен быть измерен,
помещается тело 1. При обте-
кании тела 1 жидкостью воз-
никает сила, действующая на
него, которая будет пропор-
циональна квадрату скорости
потока. Если уравновешивать
эту силу упругой силой пру-
жины 2, то при разных ско-
ростях потока, а значит, при
разных расходах деформация
пружины будет различной.
Следовательно, по величине
деформации пружины можно
судить о расходе жидкости.
Перемещение тела 1 переда-
ется рычагу, связанному с яко-
рем 3, вызывая изменение ко-
эффициента самоиндукции ка-
тушек 4 и 5, которое регист-
рируется измерительным при-
бором 6, включенным через
усилитель 7.