содержание .. 595 596 597 598 ..
Механизмы в современной технике (Артоболевский) - часть 597
6. МЕХАНИЗМЫ ИЗМЕРИТЕЛЬНЫХ
И ИСПЫТАТЕЛЬНЫХ УСТРОЙСТВ (3372)
3372
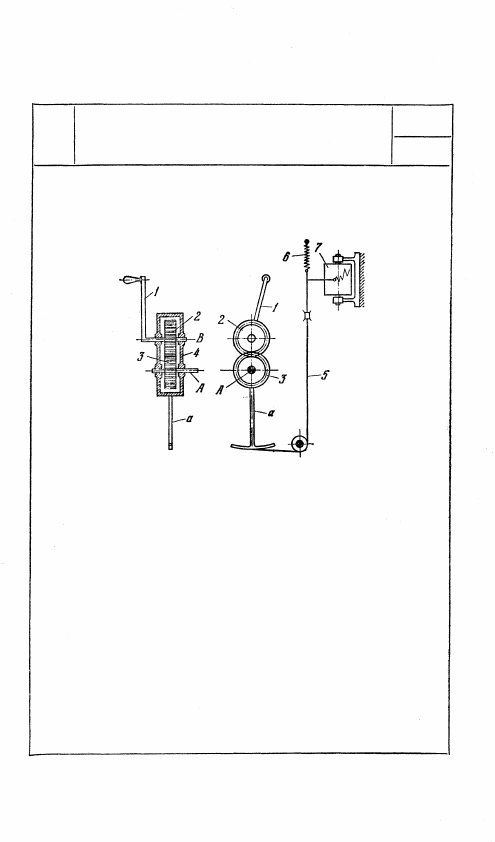
МЕХАНИЗМ ДИНАМОМЕТРИЧЕСКОЙ
РУКОЯТКИ ГОРЯЧКИНА
С ГИБКИМ ЗВЕНОМ
СГ
Ручка 1 жестко связана с круглым ци-
линдрическим зубчатым колесом 2, вхо-
дящим в зацепление с круглым цилиндри-
ческим зубчатым колесом 3. Колесо 2
вращается вокруг оси В рамки 4. При
вращении рукоятки 1 зубчатое колесо 2
обкатывает зубчатое колесо 3, ось А
которого жестко связана с валом иссле-
дуемой машины; при этом рамка 4 и жестко
связанный с ней сектор а поворачиваются,
натягивая трос 5, соединенный с изме-
рительной пружиной 6. Усилия, возни-
кающие в пружине 6, регистрируются на
вращающемся барабане 7.
379
И