содержание .. 541 542 543 544 ..
Механизмы в современной технике (Артоболевский) - часть 543
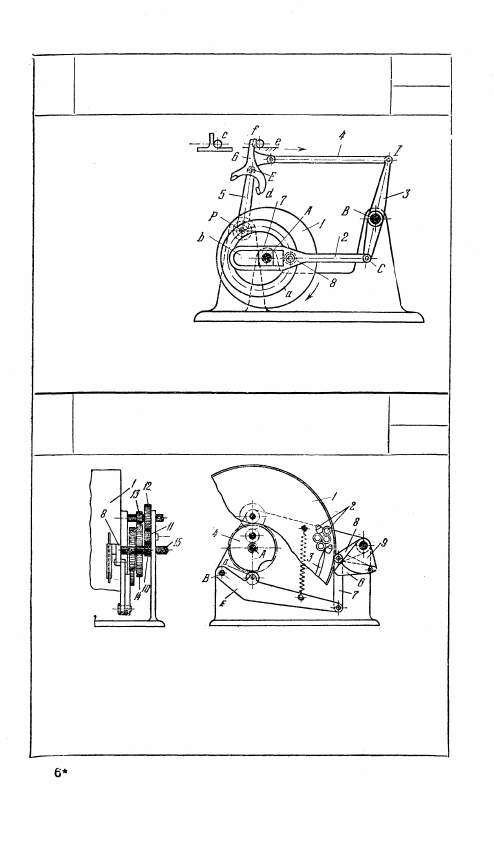
Кулачок /, вращаю-
щийся вокруг непод-
вижной оси A, имеет
паз а, в котором
перекатывается ро-
лик 8 звена 2. Звено
2 имеет прямолиней-
ную кулису b, сколь-
зящую по ползуну 7,
вращающемуся во-
круг неподвижной
оси В и входит во
вращательные пары
С и D со звеньями 2
и 4. Звено 5, вращаю-
щееся вокруг непод-
вижной оси Р, вхо-
дит во вращательную
пару Е с фасонным
звеном 6. Звено 4
входит во вращательные пары с коромыслом 3 и звеном 6. Звено 6 имеет
захваты d, которыми оно захватывает и продвигает изделие из позиции
с в позицию f вдоль неподвижной плоскости е. Со звеном 6 связано
устройство, не показанное на чертеже, обеспечивающее постоянный
контакт звена 6 с подаваемым изделием.
3058
КУЛАЧКОВО-РЫЧАЖНЫЙ
МЕХАНИЗМ ПОДАЧИ
КР
СП
При вращении вала 15 вокруг неподвижной оси А жестко наса-
женный на него барабан 1, заполненный изделиями 2, подает их
на неподвижную полосу 3, откуда они поступают в пресс. При
вращении вала 15 кулачок 4 приводится во вращение посредством
зубчатой передачи, состоящей из колес 10, 11, 12, 13 и 14. При
этом ролик а коромысла 5, вращающегося вокруг неподвижной
оси В, периодически попадает в выемку кулачка 4, благодаря
чему звено 6, жестко соединенное со звеном 8, посредством звеньев
5, 7, 8, 9 приводит в колебание барабан 1, растрясывая изделия 2.
163
3057
КУЛАЧКОВО-РЫЧАЖНЫЙ
МЕХАНИЗМ ПОДАЧИ
КР
СП