содержание .. 456 457 458 459 ..
Механизмы в современной технике (Артоболевский) - часть 458
12. МЕХАНИЗМЫ ПЕРЕКЛЮЧЕНИЯ, ВКЛЮЧЕНИЯ
И ВЫКЛЮЧЕНИЯ (2625)
2625
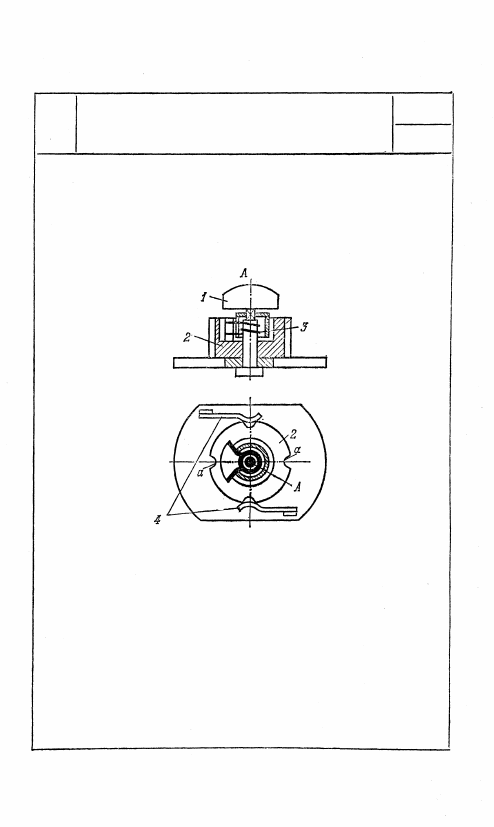
ХРАПОВОЙ МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ
ЗХ
ПВ
При вращении звена 1 вок-
руг неподвижной оси А зве-
но 2 пружиной 3 переводится
из одного положения в дру-
гое и фиксируется собачка-
ми 4, входящими в вырезы а
звена 2.
397