содержание .. 415 416 417 418 ..
Механизмы в современной технике (Артоболевский) - часть 417
2402
ЗУБЧАТО-РЫЧАЖНЫЙ ПЛАНЕТАРНЫЙ
МЕХАНИЗМ ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ
СЛОЖНОЙ КОНФИГУРАЦИИ
ЗР
ЦУ
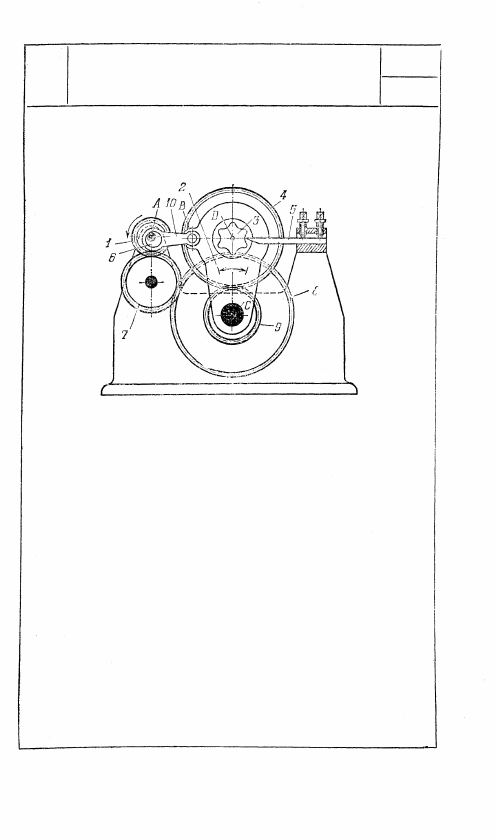
Эксцентрик 6, вращающийся вокруг непо-
движной оси A, входит во вращательную пару
с шатуном 10, который в свою очередь входит
во вращательную пару В с коромыслом 2,
вращающимся вокруг неподвижной оси С.
С эксцентриком 6 жестко связано зубчатое
колесо 1, которое посредством зубчатой пере-
дачи, состоящей из колеса 7 и жестко связан-
ных колес 8 и 9, передает вращение колесу
4, вращающемуся вокруг оси D, коромысла
2. Обрабатываемое изделие 3 сложной конфи-
гурации жестко связано с колесом 4 и участ-
вует вместе с ним в сложном движении вокруг
осей С и D. Обработка изделия производится
инструментом в форме резиа или фрезы 5,
связанной со стойкой. Форма обрабатываемой
детали зависит от размеров звеньев механизма
и передаточного отношения зубчатой передачи.
Показанная на рисунке форма изделия яв-
ляется условной.
233