содержание .. 104 105 106 107 ..
Механизмы в современной технике (Артоболевский) - часть 106
765
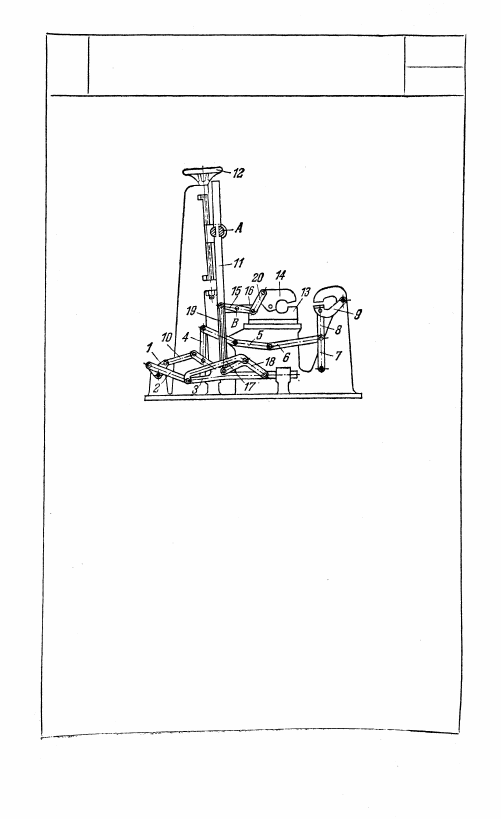
ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ
ПОДАЧИ С РЕГУЛИРОВКОЙ ХОДА
ШР
СП
При вращении двуплечего кривошипа 1
движение посредством звеньев 10, 2,
3, рычага 11, шарнирно закрепленного
в точке А, и звена 16 передается пол-
зуну 13, который движется возвратно-
поступательно. При помощи звеньев 2,
17, 18, 19, коромысла 15 и звена 20
сообщается поворот захвату 14. Пово-
рот зажима 9 осуществляется посредст-
вом звеньев 2, 3, 4, коромысла 5, зве-
ньев 6, 7, 8. Регулировка хода ползуна
13 осуществляется при помощи ручного
маховичка 12 изменением положения
шарнира А. В зависимости от величины
подачи изменяется угол поворота за-
хвата 14, так как коромысло 15 соеди-
нено со звеном 16 шарниром В.
427