Skoda Kodiaq (2019 year). Manual - part 14
WARNING
For the correct operation of the assistant the road surface must be suffi-
ciently adherent. The assistant cannot properly fulfil its function on slushy
soil due to physical reasons (e.g. ice or mud). - there is a risk of an accident!
ESC Offroad
Read and observe and on page 219 first.
ESC Offroad makes driving on dirt roads easier, as no ESC interventions occur
when the vehicle is slightly over or under steered.
ASR Offroad
Read and observe and on page 219 first.
TCS Offroad makes starting and driving on an unpaved surface easier as it par-
tially allows wheel-spin.
Note
When disabled, TCS
Offroad mode works without the support of
TCS Offroad.
EDS Offroad
Read and observe and on page 219 first.
EDS Offroad supports the driver when driving on a surface with different grip
under the drive wheels or when driving over bumps.
A spinning wheel or wheels are braked earlier and with more force than with
the intervention of the standard EDS system.
ABS Offroad
Read and observe and on page 219 first.
ABS Offroad supports the driver when braking on an unpaved surface (e.g.
gravel, snow etc.).
The system generated by a controlled locking of the wheels braked wheel be-
fore a “wedge” of piled material, which shortens the braking distance.
Maximum system efficiency is achieved when the front wheels are in the
straight ahead position.
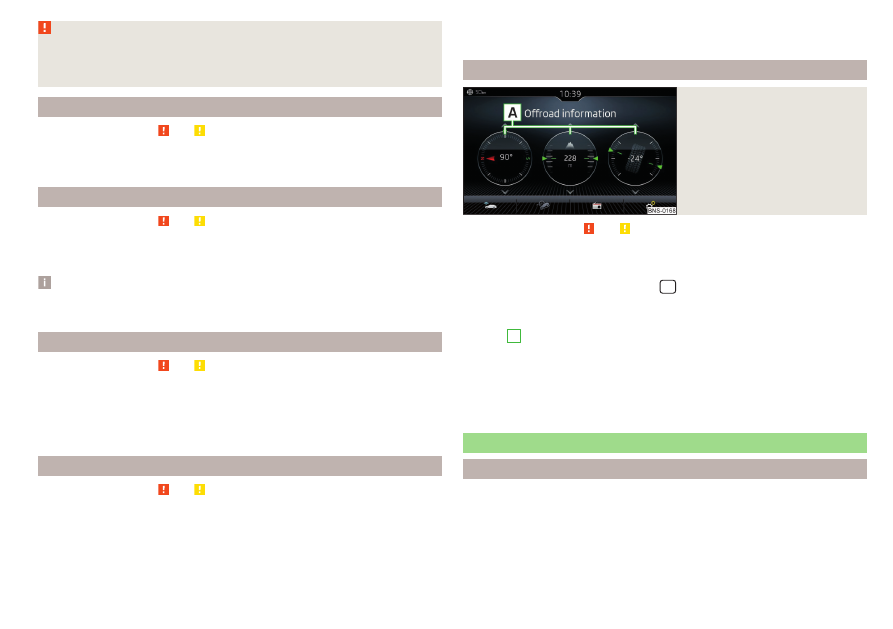
Offroad in Infotainment
Fig. 266
Offroad Infotainment display
Read and observe and on page 219 first.
The display of Offroad mode in Infotainment is used to evaluate the current
driving situation.
›
To display in the Infotainment menu
/ Tap on the function surface →
→ Offroad .
A swipe of the finger vertically across the screen allows three of the following
displays
A
to be shown
.
▶
Compass (applies to the Amundsen and Columbus Infotainment)
▶
Altimeter (applies to the Amundsen and Columbus Infotainment)
▶
Steering angle display
▶
Coolant temperature display
▶
Oil temperature display
Parking aid (ParkPilot)
Introduction
The parking aid (hereinafter referred to as system) uses acoustic signals or the
Infotainment screen when manoeuvring around obstacles in the vicinity of the
vehicle.
221
Assist systems