Nissan Rogue. Manual - part 24
AV-88
< SYSTEM DESCRIPTION >
[NAVIGATION WITHOUT BOSE]
SYSTEM
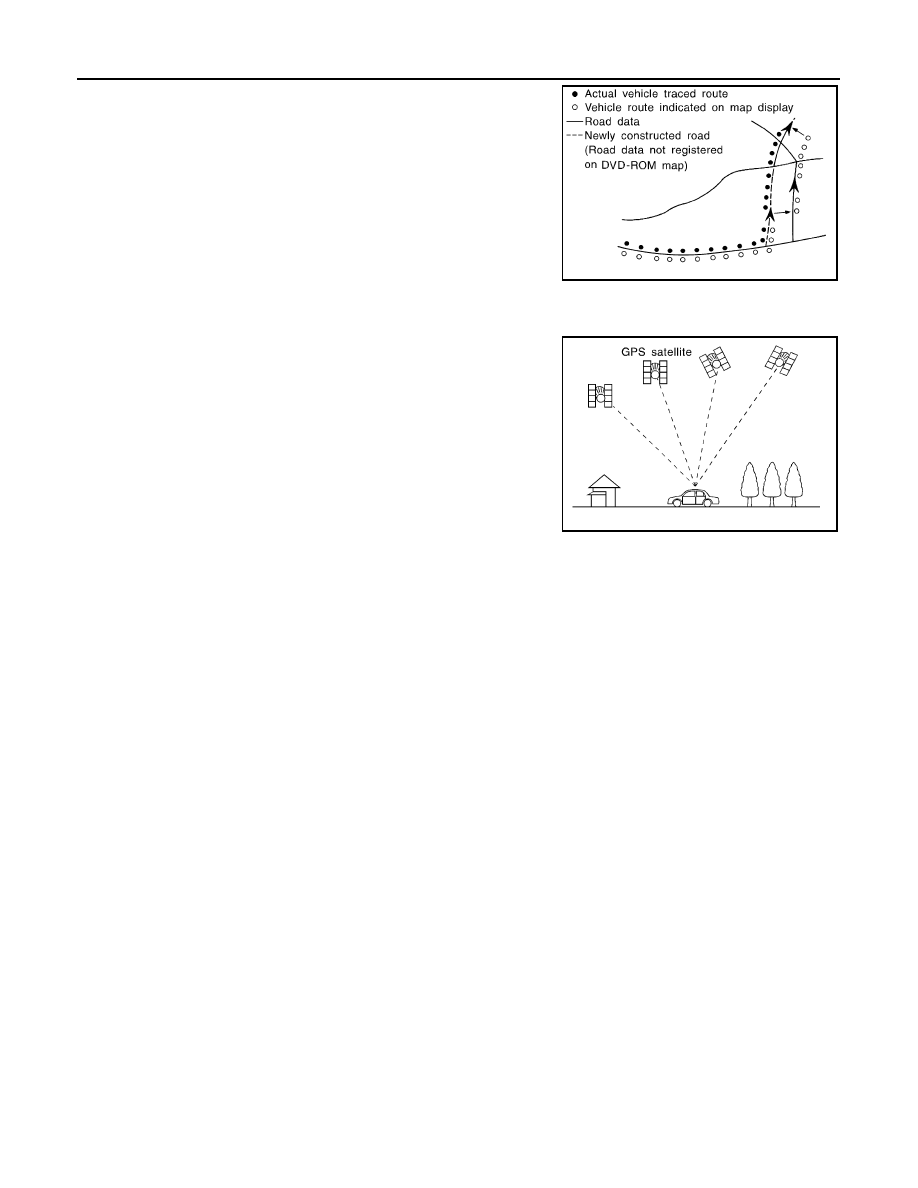
• Map-matching does not function correctly when a road on which
the vehicle is driving is new and not recorded in the map SD-card,
or when road pattern stored in the map data and the actual road
pattern are different due to repair.
The map-matching function may find another road and position the
vehicle mark on it when driving on a road not present in the map.
Then, the vehicle mark may change to it when the correct road is
detected.
• Effective range for comparing the vehicle position and travel direc-
tion calculated by the distance and direction with the road data
read from the map SD-card is limited. Therefore, correction by
map-matching is not possible when there is an excessive gap
between current vehicle position and the position on the map.
GPS (Global Positioning System)
GPS (Global Positioning System) is developed for and is controlled
by the US Department of Defense. The system utilizes GPS satel-
lites (NAVSTAR), transmitting out radio waves while flying on an orbit
around the earth at an altitude of approximately 21,000 km (13,049
mile).
The receiver calculates the travel position in three dimensions (lati-
tude/longitude/altitude) according to the time lag of the radio waves
that four or more GPS satellites transmit (three-dimensional position-
ing). The GPS receiver calculates the travel position in two dimen-
sions (latitude/longitude) with the previous altitude data if the GPS
receiver receives only three radio waves (two-dimensional position-
ing). GPS position correction is not performed while stopping the
vehicle.
Accuracy of the GPS will deteriorate under the following conditions:
• In two-dimensional positioning, GPS accuracy will deteriorate when altitude of the vehicle position changes.
• The position of GPS satellite affects GPS detection precision. The position detection may not be precisely
performed.
• The position detection is not performed if GPS receiver does not receive radio waves from GPS satellites.
(Inside a tunnel, parking in a building, under an elevated highway etc.) GPS receiver may not receive radio
waves from GPS satellites if any object is placed on the GPS antenna.
NOTE:
• The detection result has an error of approximately 10 m (32.81 ft) even with a high-precision three dimen-
sional positioning.
• There may be cases when the accuracy is lowered and radio waves are stopped intentionally because the
GPS satellite signal is controlled by the US trace control center.
USB INTERFACE
• iPod
®
or music files in USB memory can be played.
• Sound signals are transmitted from USB interface to the AV control unit and output to each speaker.
• iPod
®
is recharged when connected to USB interface.
AUX IN JACK
• Sound can be output from an external device by connecting a device to the AUX in jack.
• AUX sound signals are transmitted to each speaker via AV control unit.
SPEED SENSITIVE VOLUME SYSTEM
• Volume level of this system goes up and down automatically in proportion to the vehicle speed.
• The control level can be selected by the customer.
HANDS-FREE PHONE SYSTEM
• Bluetooth
®
control is built into AV control unit.
• The connection between cellular phone and AV control unit is performed with Bluetooth
®
communication.
• The voice guidance signal is input from the AV control unit and output to the front speakers when operating
the cellular phone.
When A Call Is Originated
SKIA0613E
SEL526V