Nissan Rogue. Manual - part 23
AV-84
< SYSTEM DESCRIPTION >
[NAVIGATION WITHOUT BOSE]
COMPONENT PARTS
Steering Angle Sensor
INFOID:0000000011276791
• Steering sensor is installed to the spiral cable.
• Steering angle sends the steering signal necessary for predictive
course line via CAN communication.
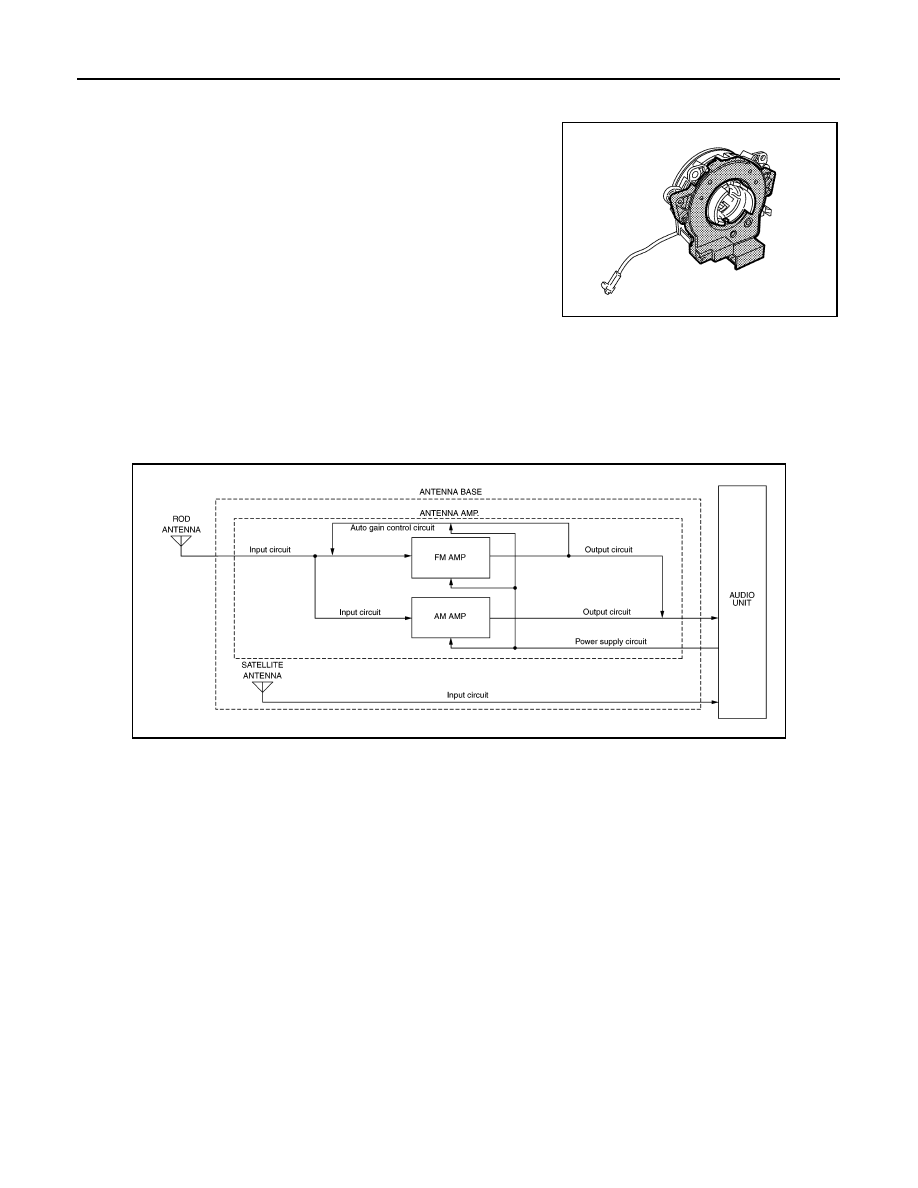
Rod Antenna, Antenna Amp., Satellite Antenna and Antenna Feeder
INFOID:0000000011276792
RADIO ANTENNA AND SATELLITE ANTENNA
AM/FM radio rod antenna, antenna base and satellite antenna are located on the rear of the roof. The antenna
amp. and satellite antenna are built into the antenna base.
ANTENNA FEEDER LAYOUT
JSNIA1571ZZ
AWNIA3133GB