Nissan Altima HL32 Hybrid. Manual - part 41
AV-156
< FUNCTION DIAGNOSIS >
[BOSE AUDIO WITH NAVIGATION]
NAVIGATION SYSTEM
NAVIGATION SYSTEM
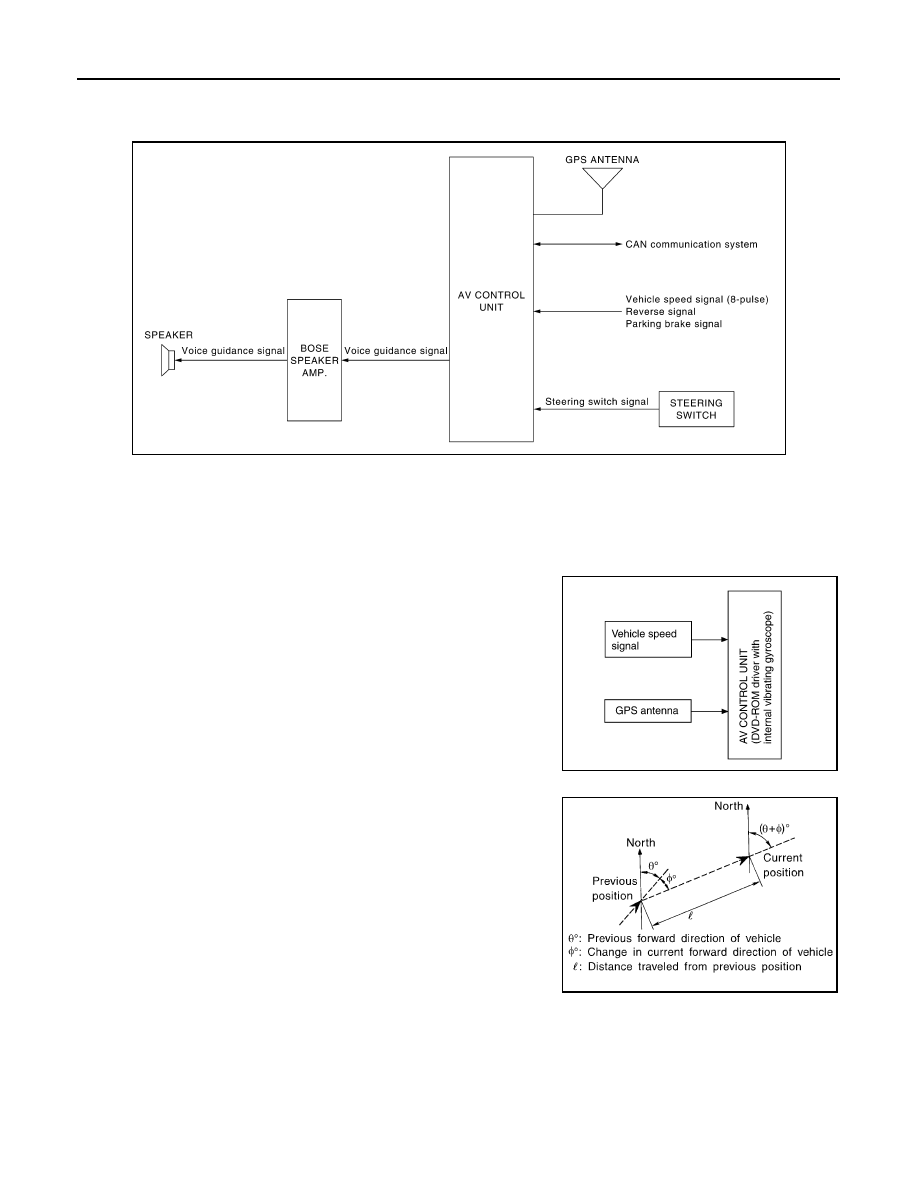
System Diagram
INFOID:0000000004219493
System Description
INFOID:0000000004219494
NOTE:
Refer to NAVI System Owner's Manual for system operation.
The navigation system periodically calculates the vehicle's current
position according to the following three signals: Travel distance of
the vehicle as determined by the vehicle speed sensor, turning angle
of the vehicle as determined by the gyroscope (angular velocity sen-
sor), and the direction of vehicle travel as determined by the GPS
antenna (GPS information).
The current position of the vehicle is then identified by comparing the
calculated vehicle position with map data read from the map DVD-
ROM, which is stored in the DVD-ROM drive (map-matching), and
indicated on the screen with a current-location mark.
By comparing the vehicle position detection results found by the
GPS and by map-matching, more accurate vehicle position data can
be used.
The current vehicle position will be calculated by detecting the dis-
tance the vehicle moved from the previous calculation point and its
direction.
TRAVEL DISTANCE
Travel distance calculations are based on the vehicle speed input signal. Therefore, the calculation may
become incorrect as the tires wear down. To prevent this, an automatic distance fine adjustment function has
been adopted.
TRAVEL DIRECTION
Change in the travel direction of the vehicle is calculated by a gyroscope (angular velocity sensor) and a GPS
antenna (GPS information). As the gyroscope and GPS antenna have both merit and demerit, input signals
AWNIA0053GB
AWNIA0054GB
SEL684V