содержание .. 8 9 10 11 ..
Nissan Tiida C11. Manual - part 10
AV-34
< FUNCTION DIAGNOSIS >
[AUDIO WITH NAVIGATION]
MULTI AV SYSTEM
Component Description
INFOID:0000000001728630
4.
Front door speaker
Driver side D12
Passenger side D112
5.
Rear door speaker
LH D207
RH D307
6.
Front tweeter
LH M109
RH M47
7.
Steering wheel audio control switch-
es M102
8.
Microphone R15
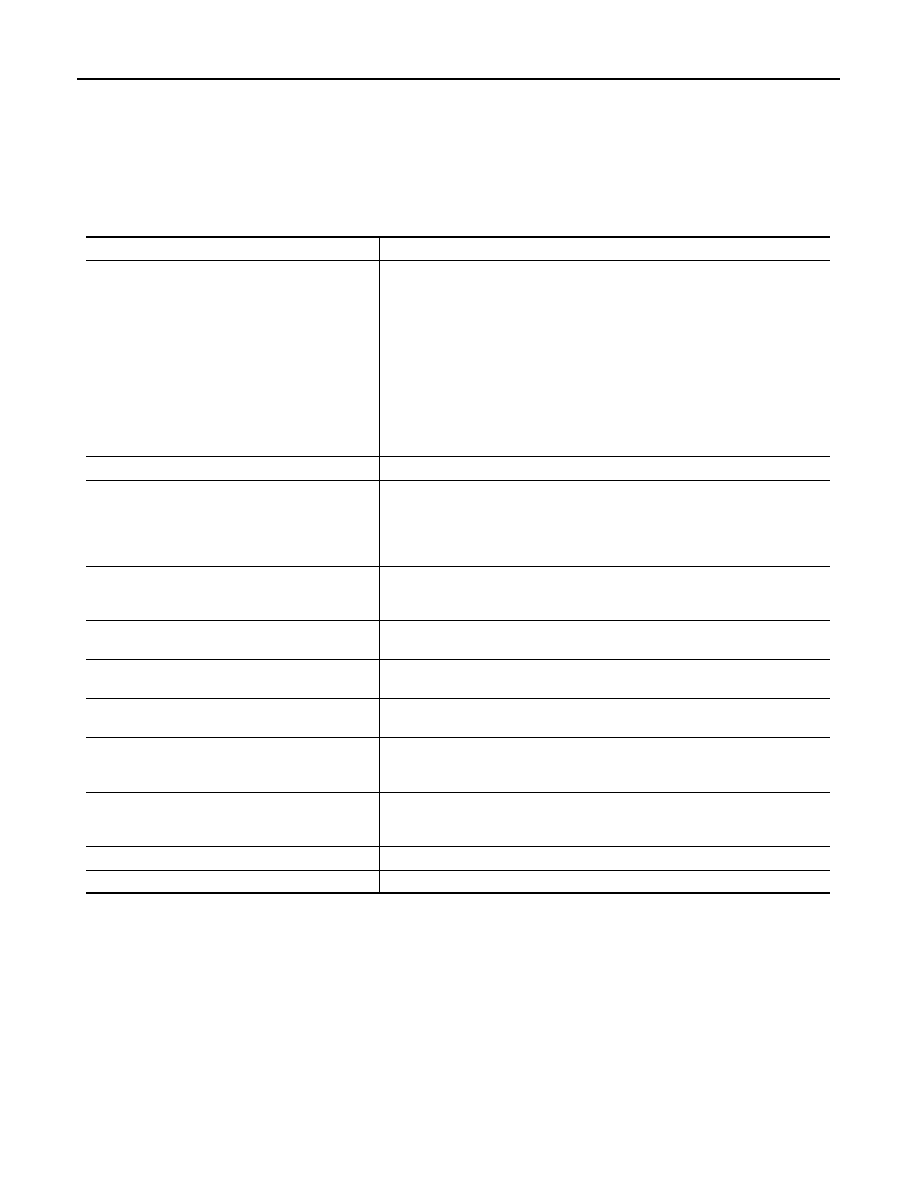
Part name
Description
NAVI CONTROL UNIT
• Map data can be read from the Map DVD-ROM by installing Map DVD-ROM.
• It is the master unit of the MULTI AV system, and it is connected to each con-
trol unit by means of communication. It operates each system according to
communication signals from the NAVI control unit.
• The NAVI control unit includes the audio, hands-free phone, navigation, and
vehicle information functions.
• It is connected to ECM and combination meter via CAN communication to ob-
tain necessary information for the vehicle information function.
• It inputs the illumination signals that are required for the display dimming con-
trol.
• It inputs the signals for driving status recognition (vehicle speed, reverse and
parking brake).
MAP DVD-ROM
A collection of Map data.
DISPLAY UNIT
• Display image is controlled by the serial communication from NAVI control
unit.
• RGB image signal is input from NAVI control unit (RGB, RGB area and RGB
synchronizing). Camera image signal is input from camera control unit.
• Synchronize signal (HP, VP) is output to NAVI control unit.
AV CONTROL UNIT
• Operational switch of MULTI AV system is integrated.
• NAVI control unit and AV communication are connected with AV control unit.
Operating signals of the switch are sent to the NAVI control unit.
FRONT DOOR SPEAKER
• Outputs sound signal from AV control unit.
• Outputs high, mid and low range sounds.
REAR DOOR SPEAKER
• Outputs sound signal from AV control unit.
• Outputs high, mid and low range sounds.
FRONT TWEETER
• Outputs sound signal from AV control unit.
• Outputs high range sound.
STEERING WHEEL AUDIO CONTROL SWITCH
• Operations for audio, hands-free phone, voice recognition and navigation,
etc. are possible.
• Steering switch signal (operation signal) is output to AV control unit.
MICROPHONE
• Used for hands-free phone operation and voice recognition.
• Mic. signal is sent to NAVI control unit.
• Power (Mic. VCC) is supplied from NAVI control unit.
GPS ANTENNA
GPS signal is received and sent to NAVI control unit.
RADIO ANTENNA
Radio signal received by antenna is sent to AV control unit.