Mitsubishi Outlander (2013+). Manual - part 224
SYSTEM OPERATION
CONTROLLER AREA NETWORK (CAN)
54C-4
• With CAN bus, the terminal resistors are incorpo-
rated in ECU. Resistors with approximately 120
Ω is used for the dominant ECU.
NOTE:
.
•
Dominant ECU: ETACS-ECU, engine ECU
and Combination meter.
•
Non-dominant ECU: ECU and sensor on CAN
network, excluding ETACS-ECU, engine ECU
and Combination meter.
• To the CAN bus line, ECU, sensor, and diagnosis
connector are connected as follows for each net-
work.
CAN-C
• ETACS-ECU
• Steering wheel sensor
• 4WD-ECU <4WD>
• SRS-ECU
• ABS-ECU <vehicles without ASC> or
ASC-ECU <vehicles with ASC>
• CVT-ECU
• EPS-ECU
• Diagnosis connector
• Engine-ECU
CAN-C-Mid
• ETACS-ECU
• OSS-ECU <vehicles with OSS>
• A/C-ECU
• KOS-ECU <vehicles with KOS>
• Radio and CD player <vehicles with radio and
CD player>
• Electric tailgate control unit <vehicles with
electric tailgate>
• CAN box unit <vehicles with MMCS>
• Corner sensor/back sensor-ECU <vehicles
with reversing sensor system>
• Combination meter
SYSTEM OPERATION
M2542000300506
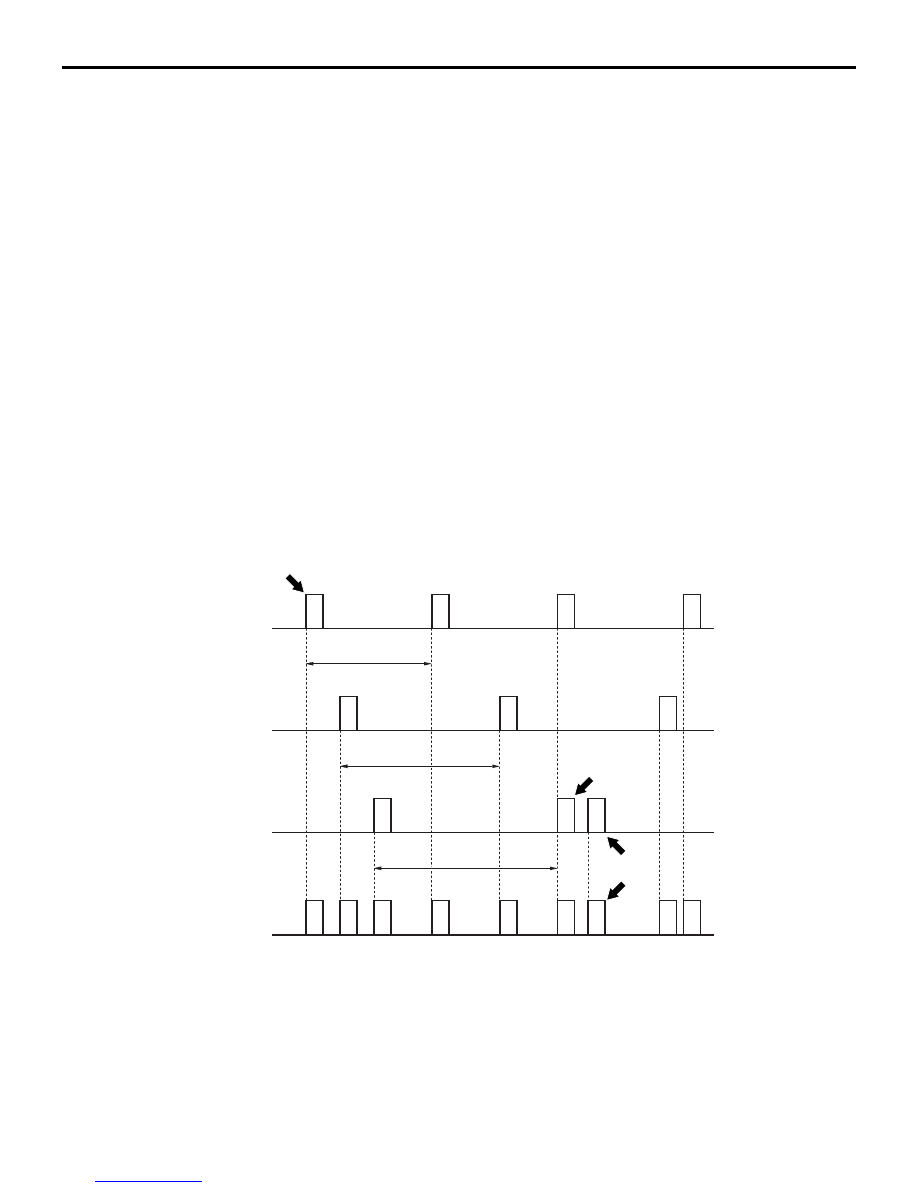
The CAN communication system is described below.
• Each ECU communicating with CAN periodically
sends several sensors’ information on CAN bus
as data frame (called periodical sending data).
For further details, consult the data frame section.
• ECUs requiring data on CAN bus can receive
data frames sent from each ECU simultaneously.
• The data sent from each ECU conducting CAN
communication is transmitted at 0.01
− 1 sec
interval depending on necessity of data.
NOTE: In the figure above, the data frame A is trans-
mitted in "a" intervals, while the data frames B
and C are transmitted at intervals "b" and "c,"
respectively.
• A single ECU transmits multiple data frames.
AC206267
ECU-1
A
A
A
A
B
B
B
C
C
A
B
Interval "a"
Interval "b"
Interval "c"
C
C
C
B
B
A
A
A
ECU-2
ECU-3
CAN bus
Data frames
AC206267AB
Transmission
suspended by
mediation
Re-
transmission
manuals search engine