Mitsubishi Evolution X. Manual - part 113
SYSTEM OPERATION
TSB Revision
CONTROLLER AREA NETWORK (CAN)
54C-5
SYSTEM OPERATION
M2542000300272
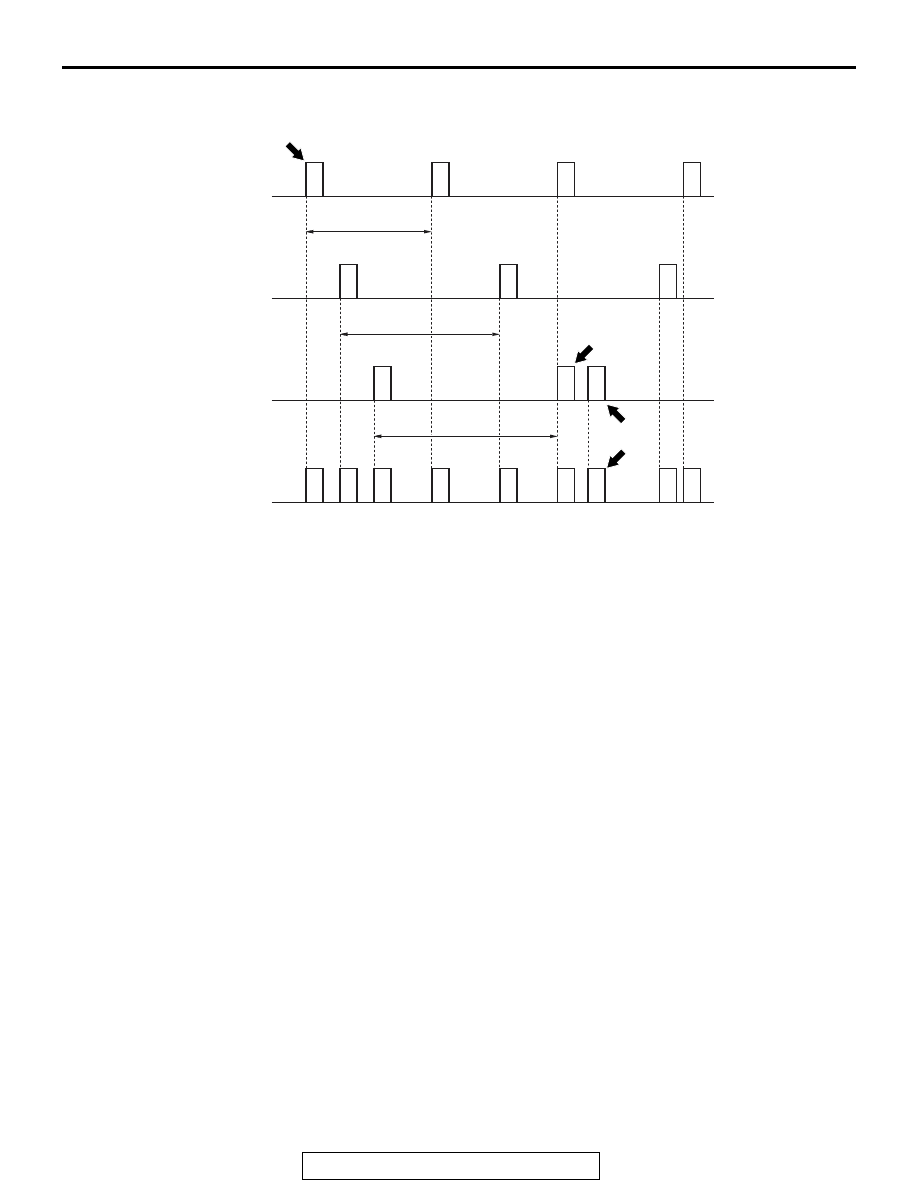
The CAN communication system is described below.
• Each ECU communicating with CAN periodically
sends several sensors’ information on CAN bus
as data frame (called periodical sending data).
For further details, consult the data frame section.
• ECUs requiring data on CAN bus can receive
data frames sent from each ECU simultaneously.
• The data sent from each ECU conducting CAN
communication is transmitted at 10-10000 msec
interval depending on necessity of data.
NOTE: In the figure above, the data frame A is
transmitted in "a" intervals, while the data frames
B and C are transmitted at intervals "b" and "c,"
respectively.
• A single ECU transmits multiple data frames.
• When data frames conflict with one another
(when plural ECUs transmit signals simulta-
neously), data is prioritised for transmission by
mediation, therefore, plural data frames are not
sent simultaneously. For further details, consult
the mediation section.
• Data is transmitted not by the conventional volt-
age-using method but by voltage potential differ-
ence. For further details, consult the section on
CAN bus voltage transformation.
• Reliability of each ECU transmitting signals via
CAN communication is secured by several error
detection and recovery processes. For further
details, consult the sections on error detection
and system recovery.
• For major communication signals (transmitting
signals) among ECUs.
.
MEDIATION
Because each ECU transmits data independently on
the CAN bus, there are cases of data collision when
multiple data frames that ECUs attempt to transmit
simultaneously (if multiple ECUs transmit at nearly
the same moment). At this moment, processing of
the ECUs attempting transmission is performed in
the following way.
1. Data frame with high priority is transmitted first
according to ID codes memorized in data frames.
2. Transmission of low-priority data (data frames) is
suspended by the issuing ECUs until the bus
clears (when no transmission data exists on the
CAN bus).
NOTE: If the suspended state continues for a
specific time, new data (data frame content) is
created and sent.
3. ECU containing suspended data frames trans-
mits the data when the bus becomes available.
NOTE: There is enough capacity on the CAN bus,
which never prevents data frames from being sent.
.
AC206267
ECU-1
A
A
A
A
B
B
B
C
C
A
B
Interval "a"
Interval "b"
Interval "c"
C
C
C
B
B
A
A
A
ECU-1
ECU-2
CAN bus
Data frames
AC206267AD
Transmission
suspended by
mediation
Re-
transmission