LEXUS LC 500H (2019 year). Instruction - part 14
218
4-5. Using the driving support systems
■
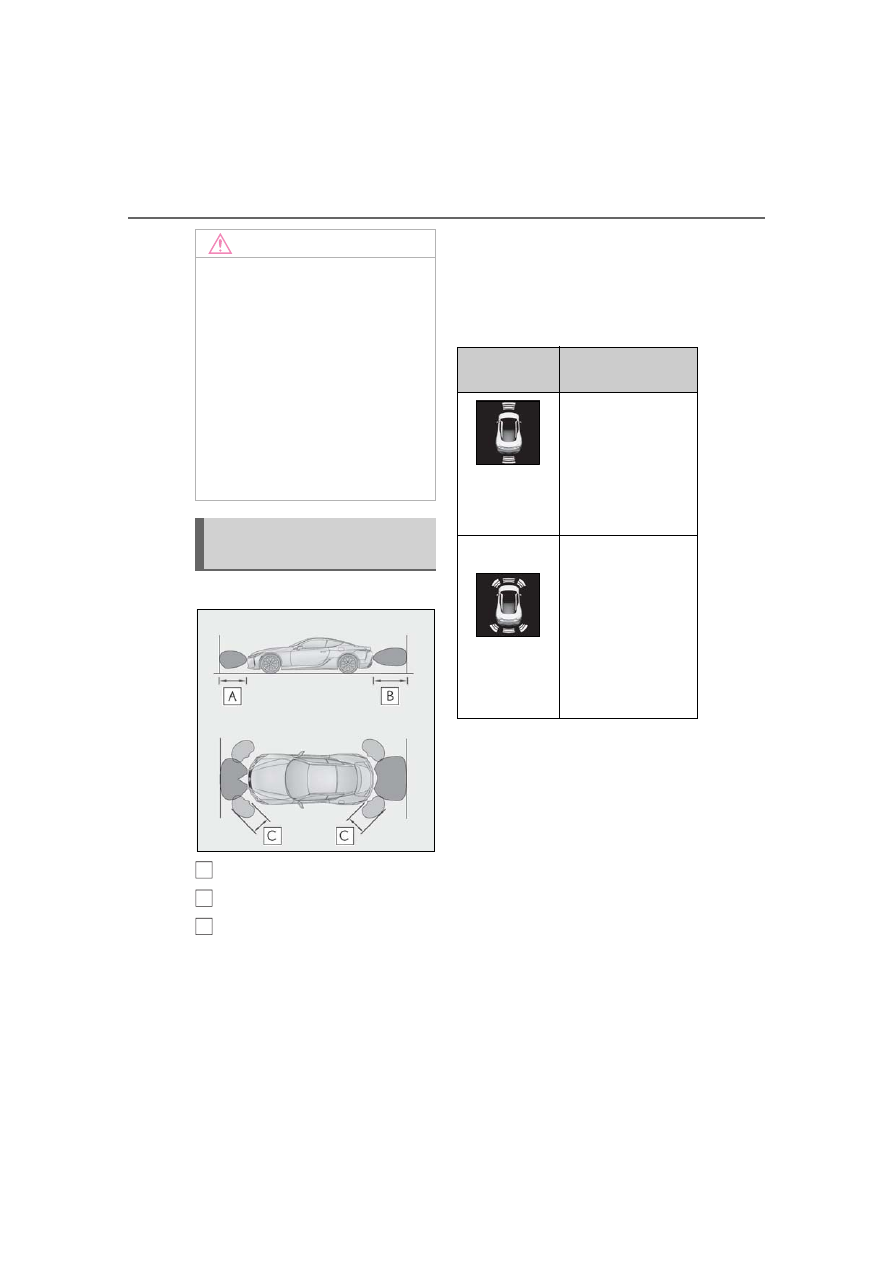
Detection range of the sensors
Approximately 3.3 ft. (100 cm)
Approximately 4.9 ft. (150 cm)
Approximately 2.0 ft. (60 cm)
The diagram shows the detection range of
the sensors. Note that the sensors cannot
detect obstacles that are extremely close
to the vehicle.
The range of the sensors may change
depending on the shape of the object etc.
■
Multi-information display, head-up
display and Center Display
Sensors that detect an obstacle will illu-
minate continuously or blink.
NOTICE
●
If the display flashes or shows continu-
ously without beeping, except when
the mute function has been turned on.
●
If a display error occurs, first check the
sensor.
If the error occurs even when there is
no ice, snow or mud on the sensor, it is
likely that the sensor is malfunctioning.
■
Notes when washing the vehicle
Do not apply intensive bursts of water or
steam to the sensor area.
Doing so may result in the sensor mal-
functioning.
Sensor detection display, obsta-
cle distance
A
B
C
Display
*1
Approximate distance
to obstacle
(continuous
*2
or
blinking
slowly
*3
)
Front center sensor:
3.3 ft. (100 cm) to 1.6 ft.
(50 cm)
Rear center sensor: 4.9
ft. (150 cm) to 2.0 ft.
(60 cm)
(continuous
*2
or
blinking
*3
)
Front center sensor: 1.6
ft. (50 cm) to 1.3 ft. (40
cm)
Rear center sensor: 2.0
ft. (60 cm) to 1.5 ft. (45
cm)
Front and rear corner
sensor: 2.0 ft. (60 cm)
to 1.5 ft. (45 cm)