Haima S5 1.5T. Service Manual - part 4
Engine block 1A-45
Standard end gap:0.09~0.273mm
Maximum end gap:0.30mm
Thrust bearing’s size Thrust bearing’s thickness
Standard 3.205~3.255
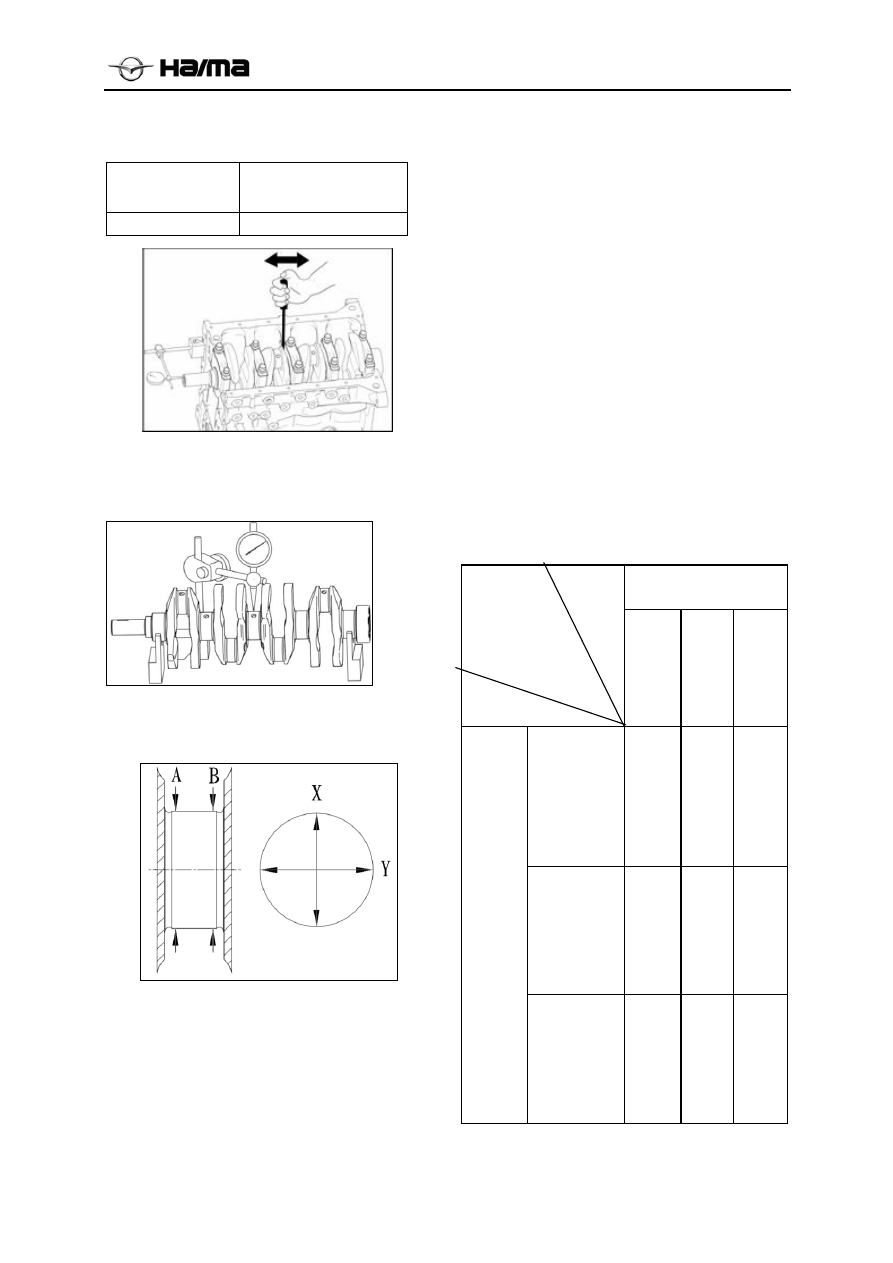
2. Measure the crankshaft’s radial run-out. If
necessary, replace the crankshaft.
Maximum radial circle run-out:0.03mm
3. Respectively at A and B point along X and Y
direction, measure the journal diameter. If
necessary, replace the crankshaft.
Main journal
Diameter(mm)
Standard
45.982~46.000
Crank pin
Diameter(mm)
Standard
43.979~44.000
4. Measure the main journal’s clearance
according to method below.
(1). Remove all oil on the crankshaft journal and
bearing seat’s internal surface.
(2). Make the plastic gauge match the bearing
width and then put it on the top of journal,
keeping parallel with the axial line.
(3). Mount the main bearing cover (see the main
bearing cover mounting part).
(4). Dismantle the main bearing cover bolt, and
slowly take off the main bearing cover (see
main bearing cover mounting part).
(5). Use the plastic gauge scale to measure the
widest point on the plastic gauge’s extruded
part, and then calculate out the journal
clearance. If the clearance exceeds the
maximum value, replace the crankshaft and
corresponding bearing bush to ensure the
standard clearance.
Standard clearance:
0.018~0.036mm
Maximum clearance: 0.1mm
Crankshaft bearing matching table mm
Crankshaft main journal
diameter
Crankshaft
bearing thickness
Cylinder
1:φ
45.994
~φ
46.000
2:φ
45.988
~φ
45.994
3:φ
45.982
~φ
45.988
1:φ
50.000
~φ
50.006
1#
1.988~
1.991
2#
1.991~
1.994
3#
1.994
~
1.997
2:φ
50.006
~φ
50.012
2#
1.991~
1.994
3#
1.994
~
1.997
4#
1.997
~
2.000
Cy
lin
de
r
m
ai
n
be
ari
ng
ho
le
di
a
m
ete
r
3:φ
50.012
~φ
50.018
3#
1.994~
1.997
4#
1.997
~
2.000
5#
2.000
~
2.003