содержание .. 74 75 76 77 ..
Тепловоз ТЭМ18ДМ. Инструкция по эксплуатации (2009 год) - часть 76
411
Р
ИС
.
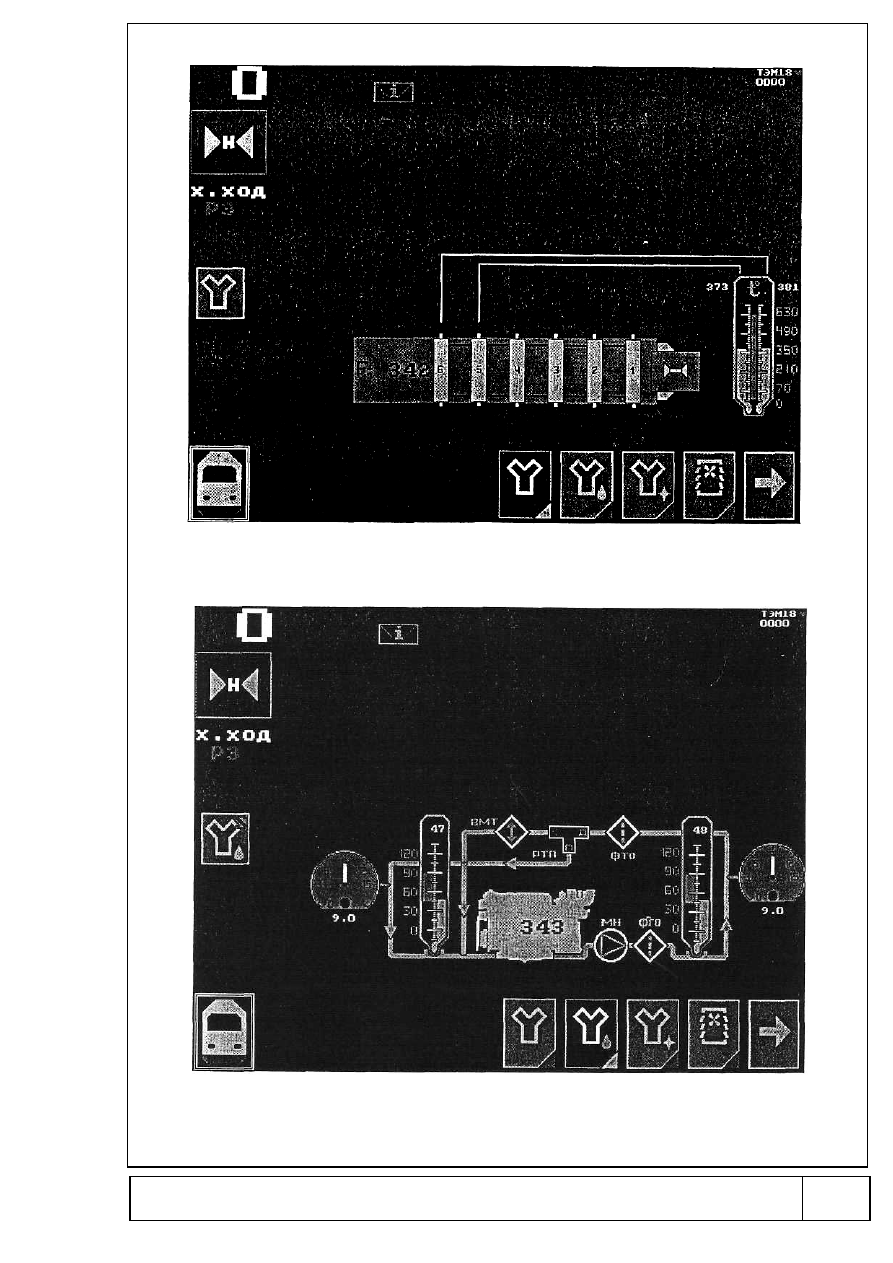
3 Общие параметры дизеля
Рис. 4 Масляная система дизеля
Главная Учебники - Разные Тепловоз ТЭМ18ДМ. Инструкция по эксплуатации (2009 год)
поиск по сайту правообладателям
|
|
|
содержание .. 74 75 76 77 ..
411
Р ИС .
3 Общие параметры дизеля
Рис. 4 Масляная система дизеля |