содержание .. 3 4 5 6 ..
Стандартные сервосистемы нового поколения ASD-B3. Руководство пользователя - часть 5

Определение энергии рекуперации
(1) Без нагрузки
(1) Направление перемещения; (2) Направление приложения момента;
(3) Регенеративная энергия, генерируемая при замедлении двигателя
При быстром торможении при отсутствии нагрузки энергия, возвращенная из двигателя, накапливается
на конденсаторах шины постоянного тока. При превышении напряжения на шине постоянного тока
тормозной резистор рассеивает излишек энергии. Для расчета энергии рекуперации используйте
следующие таблицы.
Энергия необходимая
Максимальная
Сервопривод
для полной остановки от
Инерция ротора
энергия рекуперации
Серводвигатель
(кВт)
3000 об/мин до 0
J (× 10-4кг.м2)
для конденсаторов Ec
(Дж)
Eo (Дж)
0.1
ECM-A3L-C□1040F□2□31
0.0229
0.11
4.21
0.1
ECM-A3L-C□10401□2 □31
0.04
0.20
4.21
0.2
ECM-A3L-C□10602□2 □31
0.09
0.45
5.62
ECM-A3L-C□10604□2□31
0.15
0.74
8.42
0.4
ECM-A3L-C□10804□2□31
0.352
1.74
8.42
0.75
ECM-A3L-C□10807□2□31
0.559
2.76
18.25
0.1
ECM-B3M-C□10401□2 □31
0.299
1.48
4.21
0.2
ECM-B3M-C□10602□2 □31
0.141
0.70
5.62
39

0.4
ECM-B3M-C□10604□2□31
0.254
1.26
8.42
0.4
ECM-B3M-C□10804□2□31
0.648
3.20
8.42
0.75
ECM-B3M-C□10807□2□31
1.07
5.29
18.25
1.0
ECM-B3M-E□11310□2□31
7.79
17.12
26.21
1.5
ECM-B3M-E□11315□2□31
11.22
24.66
34.94
2.0
ECM-B3M-E□11320□2□31
14.65
32.20
26.21
2.0
ECM-B3M-E□11820□2□31
29.11
63.98
26.21
3.0
ECM-B3M-F□11830□2□31
53.63
66.3
31.82
0.1
ECM-A3H-C□1040F□2□31
0.0455
0.23
4.21
0.1
ECM-A3H-C□10401□2□31
0.0754
0.37
4.21
0.2
ECM-A3H-C□10602□2□31
0.25
1.24
5.62
0.4
ECM-A3H-C□10604□2□31
0.45
2.23
8.42
0.4
ECM-A3H-C□10804□2□31
0.92
4.55
8.42
0.75
ECM-A3H-C□10807□2□31
1.51
7.47
18.25
Примечание: Символ (□1) в обозначении серводвигателей означает тип энкодера, (□2) - конфигурацию
(под шпонку, встроенный тормоз и сальник), (□3) - диаметр вала.
Если момент инерции нагрузки больше момента инерции ротора в N раз, то энергия рекуперации для
полного останова с 3000 об/мин составляет Е=(N+1) × E0. Резистор сбрасывает энергию
(N+1) ×
E0-Ec (Дж). Если время цикла работы составляет T, то энергия рекуперации = 2 x ((N+1) × E0-Ec) / T.
В таблице ниже показана последовательность вычислений:
Шаг
Операция
Уравнения и метод настройки
Установите максимальную
1
Установите значение параметра P1-53 на максимум
мощность тормозного резистора
Определите время цикла работы
2
Определяется пользователем
T
Установите скорость вращения
Определяется пользователем или значением
3
Wr
параметра P0-02 на пульте привода
Определите соотношение
Определяется пользователем или значением
4
моментов инерции нагрузки и
параметра P0-02 на пульте привода
двигателя - N
Вычислите максимальную
5
Eo = J x wr2/182
энергию рекуперации Eo
Установите максимальную
6
См. таблицу выше
поглощаемую энергию Ес
Вычислите необходимую
7
2 x (N+1) x Eo-Ec)/ T
энергию рассеивания
40

Пример:
Для двигателя ECM-A3L-CY0604RS1 (400 Вт) цикл возвратно-поступательного движения составляет T =
0,4 с.
Его скорость вращения составляет 3000 об/мин, а инерция нагрузки в 15 раз больше инерции
двигателя.
Максимальная
Энергия необходимая для
энергия
Сервопривод
Инерция ротора
полной остановки от 3000
Серводвигатель
рекуперации для
(кВт)
J (× 10-4кг.м2)
об/мин до 0
конденсаторов
Eo (Дж)
Ec (Дж)
0.4
ECM-A3L-CY0604RS1
0.15
0.74
8.42
Найдем максимальную регенеративную энергию: Eo = 0,74 Дж (из таблицы выше).
Найдем рекуперативную энергию, которая может быть поглощена конденсатором: Ec = 8,42 джоулей (из
таблицы выше).
Требуемая мощность тормозного резистора =
= 17.1 Вт.
Из приведенного выше расчета требуемая мощность тормозного резистора составляет 17,1 Вт, что
меньше указанной мощности. В этом случае встроенный тормозной резистор мощностью 40 Вт
удовлетворяет потребность. В общем, встроенный тормозной резистор может удовлетворить
требования, когда внешняя нагрузка не слишком велика.
(2) С нагрузкой и вращением двигателя в обратном направлении
(3)
(1)
(2)
(1) Направление вращения; (2) Направление приложенного момента; (3) Регенеративная энергия
При наличии внешнего момента нагрузки серводвигатель вращается в обратном направлении, если
момент нагрузки больше момента двигателя. Обычно серводвигатель вращается в прямом
направлении, и его момент приложен в направлении вращения. Однако, здесь есть несколько
специальных условий. Если момент двигателя направлен противоположно вращению, двигатель
находится в режиме реверса. Внешняя энергия передается через двигатель в серво-преобразователь.
Процесс представлен на рисунке ниже. Можно видеть, что двигатель вращается в прямом направлении
41

с постоянной скоростью, когда внешний момент нагрузки изменяется, что приводит к увеличению
энергии рекуперации. Когда шина постоянного тока заполнена и не может сохранить больше энергии,
эта энергия потребляется тормозным резистором.
Скорость двигателя
d
Внешний момент нагрузки
Выходной момент двигателя
e
d
Обратное
Прямое
Обратное
Прямое
n
вращение
вращение
вращение
вращение
n
Внешняя нагрузка в обратном вращении: TL* Wr; TL: внешний момент нагрузки
Для обеспечения надежной работы настоятельно рекомендуется выбирать параметры тормозного
резистора в соответствии со значениями нагрузки двигателя.
Пример:
Для двигателя ECM-A3L-CY0604RS1 (400 Вт), когда момент внешней нагрузки составляет
+70% от
номинального момента (1,27 Н.м) при скорости вращения до 3000 об/мин, мощность требуемого
внешнего тормозного резистора составляет:
= 558 Вт. Выбираем тормозной
резистор 560 Вт и 40 Ом.
2.8 Электромагнитный тормоз
Серводвигатель может иметь в своей конструкции встроенный электромагнитный тормоз. Для его
управления предназначен выходной дискретный сигнал BRKR. При установке этого сигнала в
выключенное состояние (OFF), двигатель остановится, и электромагнитный тормоз заблокирует
вращение вала двигателя. При установке этого сигнала во включенное состояние (ON),
электромагнитный тормоз разблокируется, и двигатель сможет свободно вращаться.
Есть два параметра для управления электромагнитным тормозом. Параметр Р1-42 (сигнал MBT1) и
параметр Р1-43 (сигнал MBT2) определяют времена задержки включения и отключения сигнала BRKR
42

относительно сигнала SON. Электромагнитный тормоз используется в основном при обесточенном
двигателе для предотвращения свободного вращения вала двигателя. Во избежание механических
повреждений тормоз должен включаться только после снятия сигнала SON.
При использовании электромагнитного тормоза для торможения вала двигателя необходимо чтобы
момент торможения двигателя и момент наложения тормоза не совпадали в течение процесса
торможения. Если момент наложения электромеханического тормоза совпадет с моментом, когда
сервоусилитель еще обеспечивает работу двигателя то сервопривод может отключиться по перегрузке.
Временная диаграмма работы электромагнитного тормоза:
ON
SON
OFF
OFF
(DI вход)
ON
BRKR
OFF
OFF
(DO выход)
MBT1(P1-42)
MBT2(P1-43)
ZSPD(P1-38)
Скорость
двигателя
Пояснения:
1. При установленном значении задержки в параметре Р1-43, после снятия сигнала SON и
скорости двигателя выше установленного значения в параметре Р1-38, сигнал BRKR будет
отключен (OFF) - тормоз блокирует вращение.
2. При установленном значении в параметре Р1-43=0, после снятия сигнала SON и скорости
двигателя ниже установленного значения в параметре Р1-38, сигнал BRKR будет отключен
(OFF) - тормоз блокирует вращение.
Схема подключения тормоза
43

Сервопривод
Серводвигатель
Автоматический
выключатель
Не соединяйте:
Мотор
Синий провод
Тормоз
Реле
Источник питания
тормоза 24VDC
Энкодер
Гарантируйте правильную
полярность (+/-)
Коричневый провод
подключения диода
Примечания:
1)
Смотрите раздел 3 по подключению.
2)
BRKR - сигнал управления тормозом. Сервопривод ASDA-B3 имеет дискретный выход
сигнала BRKR, который вместе с внешним реле и внешним источником питания составляет
полную схему управления тормозом.
3)
Катушка тормоза не имеет полярности.
4) Источник питания тормоза: DC24V. Не используйте для питания тормоза встроенный источник
сервопривода: VDD, +24V.
Рассчитаем номинальный ток тормоза (здесь в качестве примера используется двигатель
ECM-A3L-CY0604RS1).
Потребляемая мощность тормоза (20 °C) = 6,5 Вт (см. Технические характеристики), поэтому
номинальный ток тормоза =
= 0.27 A.
44

Глава 3. Подключение
Эта глава содержит необходимые сведения по подключению сервопривода серии ASDA-B3, описание
входов и выходов привода, а также примеры типовых подключений в различных режимах.
3.1 Конфигурация
3.1.1 Соединение с внешними устройствами
45
Примечания:
1. Проверьте правильность подключения питания между клеммами R, S, T и между клеммами L1c, L2c.
2. Проверьте правильность подключения выходов U, V, W серводвигателя. Некорректное подключение
приведет к остановке двигателя или неисправности.
3. При подключении внешнего тормозного резистора контакты P и D должны быть разомкнуты, а
резистор подключается к контактам P и C. При подключении внутреннего тормозного резистора
контакты P и D замкнуты, а контакты P и C разомкнуты.
4. При возникновении тревоги или аварийном останове используйте выходы ALARM или WARN и
отключите питание с магнитного контактора для отключения питания сервопривода.
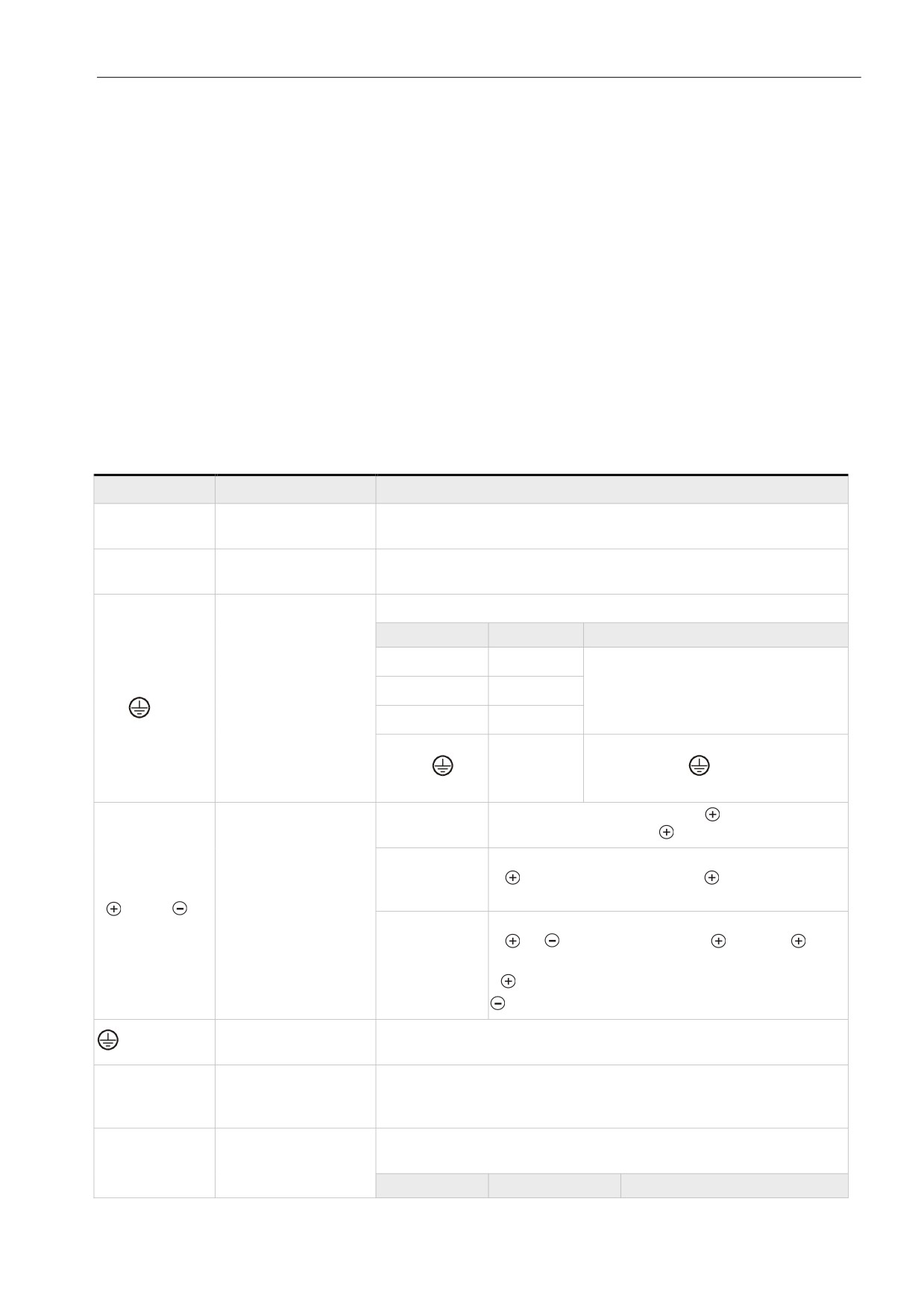
3.1.2 Клеммы и разъёмы привода
Обозначение
Описание
Замечания
Клеммы питания
L1c, L2c
Переменное однофазное напряжение 220 В.
цепей управления
Клеммы силового
При однофазном питании 220 В используются клеммы R и S.
R, S, T
питания
При трехфазном питании 220 В используются клеммы R, S, T.
Клеммы для подключения серводвигателя
Обозначение
Цвет
Замечание
U
Красный
Соединение с трехфазным
U, V, W
Клеммы
V
Белый
кабелем питания
подключения
серводвигателя.
FG (
)
двигателя
W
Черный
Соединение с клеммой
FG(
)
Зеленый
заземления (
)
серводвигателя.
Встроенный
Проверьте, чтобы клеммы P и D были
резистор
замкнуты, а клеммы P и C разомкнуты.
Внешний резистор подключается к клеммам
Внешний
Клеммы
P и C, при этом клеммы P и D должны
резистор
подключения
быть разомкнуты.
P
, D, C,
тормозного
резистора или
Тормозной модуль подключается к клеммам
P и
, при этом клеммы P и D, и P и C
модуля
Внешний
должны быть разомкнуты.
модуль
P
: это клемма (+) звена постоянного тока.
: это клемма (-) звена постоянного тока.
Клемма
Клемма для подключения провода заземления двигателя и
два места
заземления
питания.
Разъём
Используется для подключения внешних цепей управления.
CN1
входов/выходов
Подробнее в разделе 3.3
(опция)
Разъём энкодера
Используется для подключения энкодера двигателя.
двигателя
Подробнее в разделе 3.4
CN2
(опция)
Обозначение
Цвет
Контакт №
46

T+
Синий
4
T-
Синий/Черный
5
Не
-
3
используется
Не
-
2
используется
Не
-
1
используется
Не
-
9
используется
Красный и
8
+5V
Красный/Белый
Черный и
6, 7
GND
Черный/Белый
Разъём послед.
Используется для связи по RS-485 или CANopen интерфейсу.
CN3
связи (опция)
Подробнее в разделе 3.5.
Разъем mini USB
CN4
Подключение ПК. Подробнее в разделе 3.6.
(опция)
Разъем DMCNET
Используется для связи по DMCNET или EtherCAT
CN6
или EtherCAT
интерфейсу. Подробнее в разделе 3.7.
(опция)
CN10
Разъем STO
Подключение STO. Подробнее в разделе 3.9.
Примечание:
Терминалы U, V ,W , CN1, CN2, CN3 имеют схему защиты от короткого замыкания.
Замечания по подключению
При подключении или перемещении сервопривода или серводвигателя необходимо соблюдать меры
предосторожности во избежание поражения электрическим током.
1.
Убедитесь в правильности подключения сетевого питания и кабеля двигателя к соответствующим
клеммам (R, S, T, L1с, L2с, U, V и W).
2.
Используйте для монтажа сдвоенные витые пары для уменьшения помех.
3.
Во избежание поражения электрическим током не прикасайтесь к силовым терминалам (R, S, T, L1C,
L2C, U, V, и W). После отключения питания на элементах сервопривода в течение нескольких
минут может оставаться напряжение. Дождитесь, пока светодиод питания погаснет полностью.
(Смотрите также раздел «Меры предосторожностиª на стр. ii).
4.
Силовые кабели питания и двигателя должны быть расположены отдельно от кабеля энкодера и
других сигнальных кабелей. Не размещайте силовые и сигнальные кабели ближе 30 см друг от друга.
5.
Для кабеля энкодера используйте витые экранированные провода. При длине более 20 метров
продублируйте провода сигналов энкодера для компенсации.
6.
Для кабеля двигателя используйте провода и кабели на напряжение не ниже 600 В, при длине кабеля
более 30 метров увеличьте сечение проводов для снижения потерь.
7.
Экраны кабелей должны быть подключены со стороны сервопривода к клемме заземления .
47

8. Спецификация разъёмов и кабелей приведена в разделе 3.1.6.
3.1.3 Методы подключения питания
Для сервоприводов мощностью от 100 Вт до 1.5 кВт используется однофазное или трехфазное питание
220В. Для приводов от 2 кВт используется только трехфазное питание 220В.
Схемы подключения приведены на рисунках 3.2, 3.3 и 3.4.:
Кнопка «Power ON» - «Вкл. силового питания» - Н.О. контакт.
Кнопка «Power OFF» - «Выкл. силового питания» и ALRM_RY- Н.З. контакт.
MC: электромагнитный контактор.
ALRM_RY: Аварийное реле.
ALRM_RY_B: Н. З. контакт аварийного реле.
SPD: Устройство защиты от перенапряжения.
Рис. 3.2. Однофазный источник питания (модели на 1.5кВт и ниже)
Автоматический выключатель
Фильтр
Мотор
Сервопреобразователь
48
содержание .. 3 4 5 6 ..