содержание .. 43 44 45 46 ..
Инверторы серии FRENIC-AQUA. Руководство пользователя (2012 год) - часть 45
6-80
F40, F41
Предел
момента
1 (
Вращение
,
Торможение
)
E16
и
E17 (
Предел
момента
2 (
Вращение
,
Торможение
))
H76
(
Предел
момента
при
торможении
,
Предел
возрастания
частоты
)
Если
выходной
момент
инвертора
превышает
определенные
уровни
пределов
момента
(F40, F41, E16
и
E17),
инвертор
изменяет
выходную
частоту
и
ограничивает
выходной
момент
,
предотвращая
аварийную
остановку
.
Для
использования
пределов
момента
необходимо
настроить
параметры
,
указанные
в
таблице
ниже
.
При
торможении
инвертор
увеличивает
выходную
частоту
с
целью
ограни
-
чения
выходного
момента
.
В
зависимости
от
рабочих
условий
выходная
частота
может
опасно
возрасти
.
Параметр
H76 (
Предел
возрастания
частоты
)
обеспечивает
ограничение
возрастания
частотной
составляющей
.
Пределы
момента
1
и
2 (F40, F41, E16
и
E17)
Диапазон
установки
значения
: 20 – 150 (%), OFF (
Выключен
)
Эти
параметры
служат
для
определения
рабочего
уровня
активации
пределов
момента
в
процентах
от
номинального
момента
двигателя
.
Параметр
Наименование
Параметр
ограничения
момента
F40
Предел
момента
1 (
Вращение
)
Предел
момента
вращения
1
F41
Предел
момента
1 (
Торможение
)
Предел
момента
торможения
1
E16
Предел
момента
2 (
Вращение
)
Предел
момента
вращения
2
E17
Предел
момента
2 (
Торможение
)
Предел
момента
торможения
2
Уровни
пределов
момента
,
устанавливаемые
через
интерфейс
связи
(S10, S11)
Уровни
пределов
момента
могут
изменяться
посредством
кода
через
интерфейс
связи
.
Параметры
S10
и
S11
специально
зарезервированы
для
управления
параметрами
F40
и
F41
через
интерфейс
связи
.
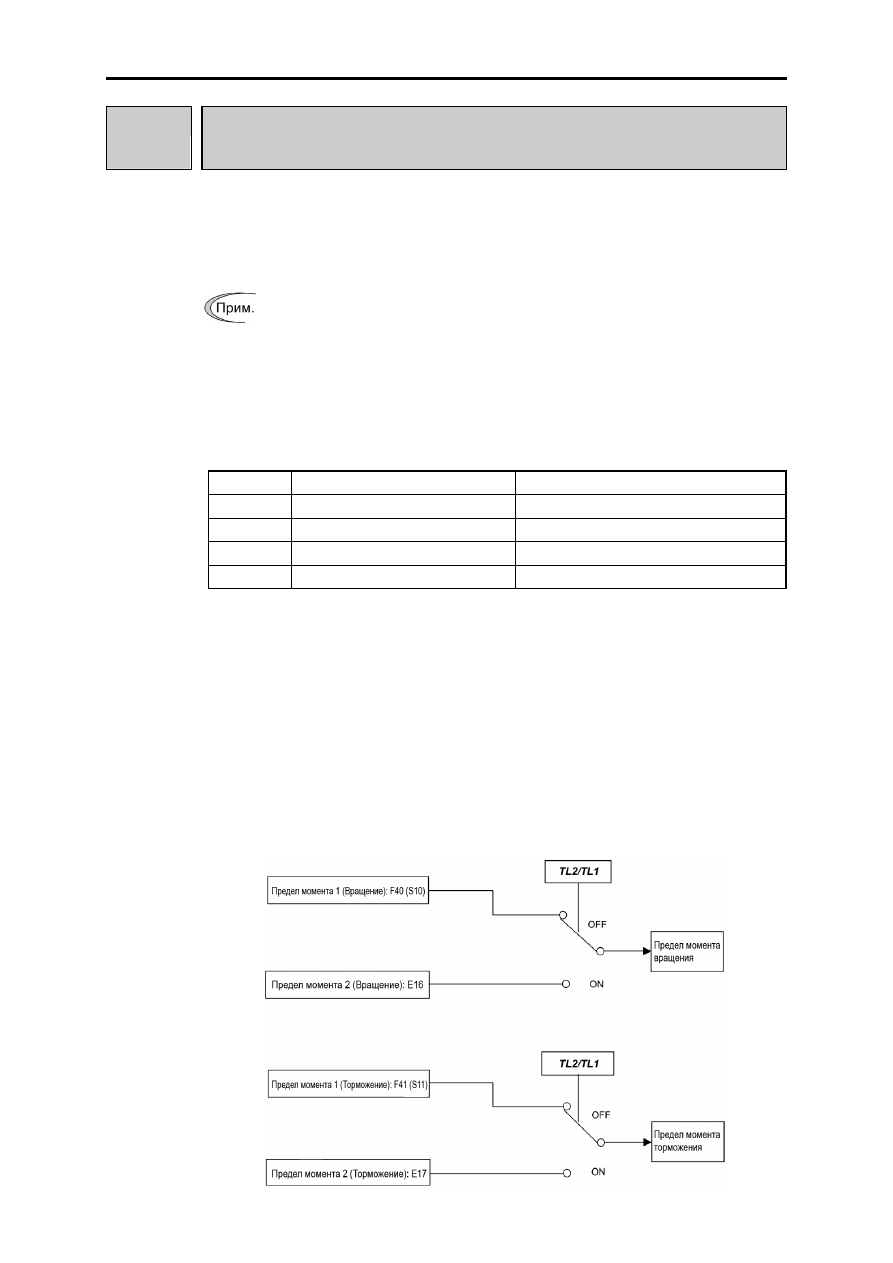
Переключение
пределов
момента
Пределы
момента
могут
переключаться
с
помощью
установки
параметра
и
с
помощью
дискретных
команд
TL2/TL1
("
Выбор
уровня
предела
момента
2/1"),
назначенных
любой
из
входных
клемм
.
Для
назначения
функций
TL2/TL1
входной
клемме
установите
в
любом
из
параметров
с
E01
по
E07
значение
"14".
Если
команды
TL2/TL1
не
назначены
,
по
умолчанию
действует
предел
момента
1 (F40
и
F41).