Parker Variable Speed Drive AC30 series. User’s Manual (2017) - page 9
Setup Wizard
9-4
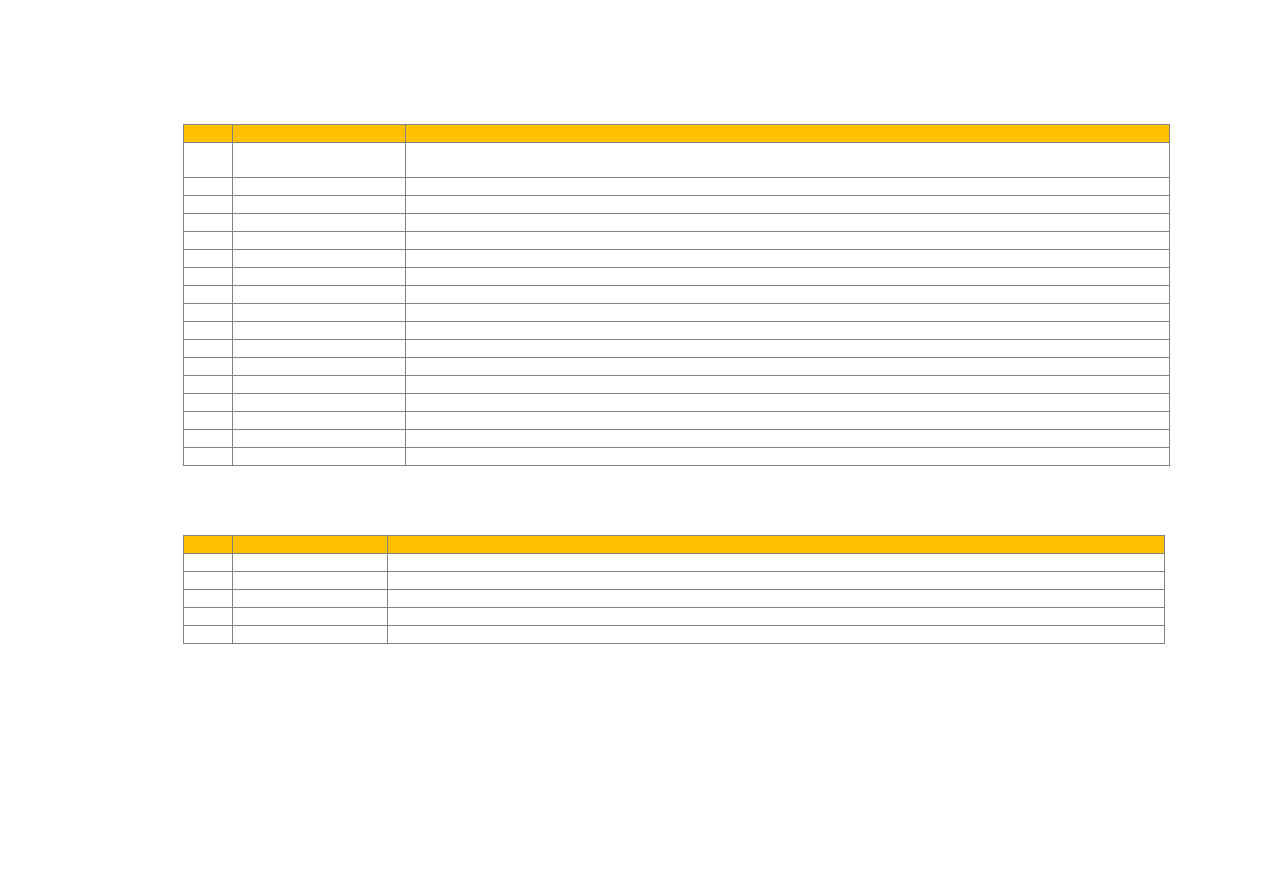
Input and Output Option
Configuration of the type and settings for the available IO options.
PNO
Parameter
Comment
Setup Option IO?
Select TRUE to configure the IO Option. Set to FALSE to skip this section
Only shown if an IO option is fitted, or if one has been previously configured.
1178 Option IO Required
Select the required IO Option type.
1184 Thermistor Type
Select the required thermistor type.
1511 Encoder Supply
For the Pulse Encoder option, configures the encoder supply output.
1512 Encoder Lines
For the Pulse Encoder option, configures the number of pulses per revolution
1514 Encoder Type
For the Pulse Encoder option, configures the encoder type
1515 Encoder Single Ended
For the Pulse Encoder option, configures whether the input is single ended or differential.
1791 Resolver Frequency
Frequency of the Resolver excitation in kHz
1790 Resolver Voltage
Voltage supply of the Resolver excitation in Vrms
1792 Resolver Ratio
Resolver Ratio, corresponding to the ratio between excitation voltage and max sin and cos voltages
1825 Resolver Max Speed
Mechanical Resolver max speed in rpm
1793 Resolver Poles
Resolver poles number -Should be an even number
1822 Resolver Built-In Gear
Number of shaft mechanical turns for 1 Resolver turn
1810 Resolver Invert
To change the count direction of the Resolver
1815 Resolver Speed Filter
Speed filter action, in % of the actual speed value in Hz
1851 Resolver Min Filter
Minimum filter value applied to the speed information. The filter value is at leat equal to this value
1816 Resolver Resolution
Resolver resolution selection, in bits per electrical turns (eg: 16 bits is 65536 counts per electrical resolver turn)
Analog Input and Output
Configuration of the ranges for the analog inputs and outputs. Also selects the thermistor type if an IO option is fitted.
PNO
Parameter
Comment
Setup Input/Output?
Select TRUE to configure the analog input and output ranges. Set to FALSE to skip this section
0001 Anin 01 Type
Select the hardware range for analog input 1
0002 Anin 02 Type
Select the hardware range for analog input 2
0003 Anout 01 Type
Select the hardware range for analog output 1
0004 Anout 02 Type
Select the hardware range for analog output 2