содержание .. 453 454 455 456 ..
Механизмы в современной технике (Артоболевский) - часть 455
2610
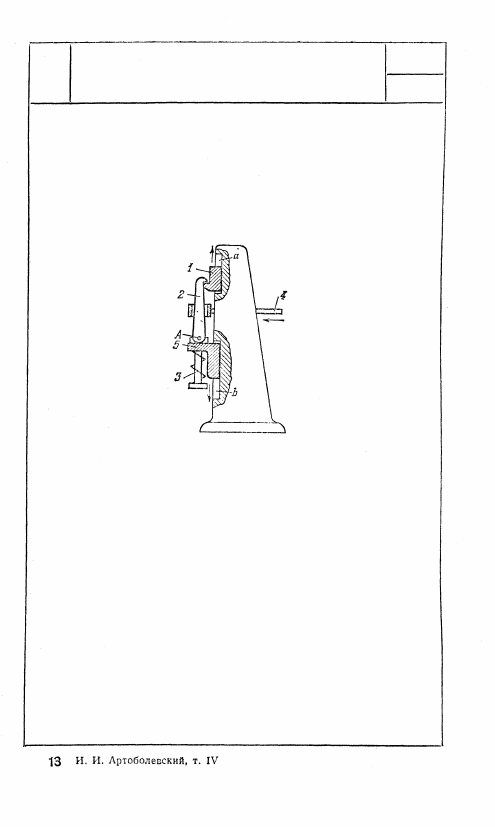
ХРАПОВОЙ МЕХАНИЗМ ДВОЙНОГО
СТОПОРА
ЗХ
03
Звенья 1 и 5 удерживают-
ся в положении, указан-
ном на рисунке, собач-
кой 2 и пружиной 3.
После освобождения со-
бачки 2 ее поворотом вок-
руг оси А рычагом 4
звенья 1 и 5 движутся
в неподвижных направ-
ляющих а и b, получая
возможность движения в
направлении, указанном
стрелками.
385