содержание .. 316 317 318 319 ..
Механизмы в современной технике (Артоболевский) - часть 318
1906
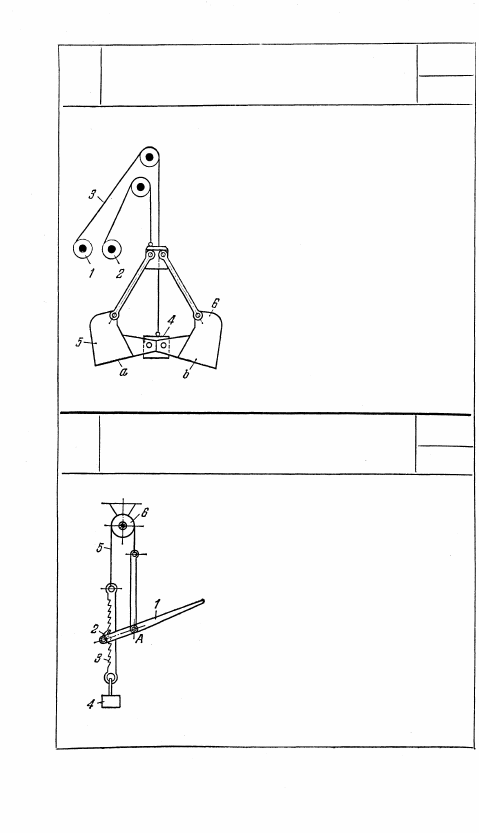
ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ
ДВУХКАНАТНОГО ГРЕЙФЕРА
РГ
Гп
При спуске грейфера барабаны 1 и
2 вращаются по часовой стрелке, при
этом грейфер будет открыт. При за-
крывании грейфера барабан 1 враща-
ется против часовой стрелки, а ба-
рабан 2 неподвижен, при этом ка-
нат 3 натягивается и подвижная тра-
верза 4 идет вверх; челюсти грей-
фера 5 и 6, захватывая материал,
сходятся до плотного соприкоснове-
ния их режущих кромок а и b. При
подъеме барабаны 1 и 2 вращаются
против часовой стрелки. При опорож-
нении грейфера барабан 2 заторма-
живается, а барабан 1 вращается по
часовой стрелке, благодаря этому че-
люсти 5 и 6 грейфера под влиянием
собственного веса и веса захваченно-
го материала раскрываются и мате-
риал высыпается.
1907
РЫЧАЖНО-ХРАПОВОЙ РЕЕЧНЫЙ
МЕХАНИЗМ С ГИБКИМ ЗВЕНОМ
РГ
Гп
Храповая рейка 3 подвешена к гиб-
кому звену 5, перекинутому через
блок 6. При качании вокруг оси А
рычага 1, несущего на себе собачку 2,
рейка 3 и груз 4 поднимаются вверх.
Обратному движению груза препят-
ствует стопорная собачка или тор-
моз, не показанный на чертеже.
240