Infiniti FX35, FX50 (S51). Manual - part 98
AV
SYSTEM
AV-165
< SYSTEM DESCRIPTION >
[NAVIGATION (SINGLE MONITOR)]
C
D
E
F
G
H
I
J
K
L
M
B
A
O
P
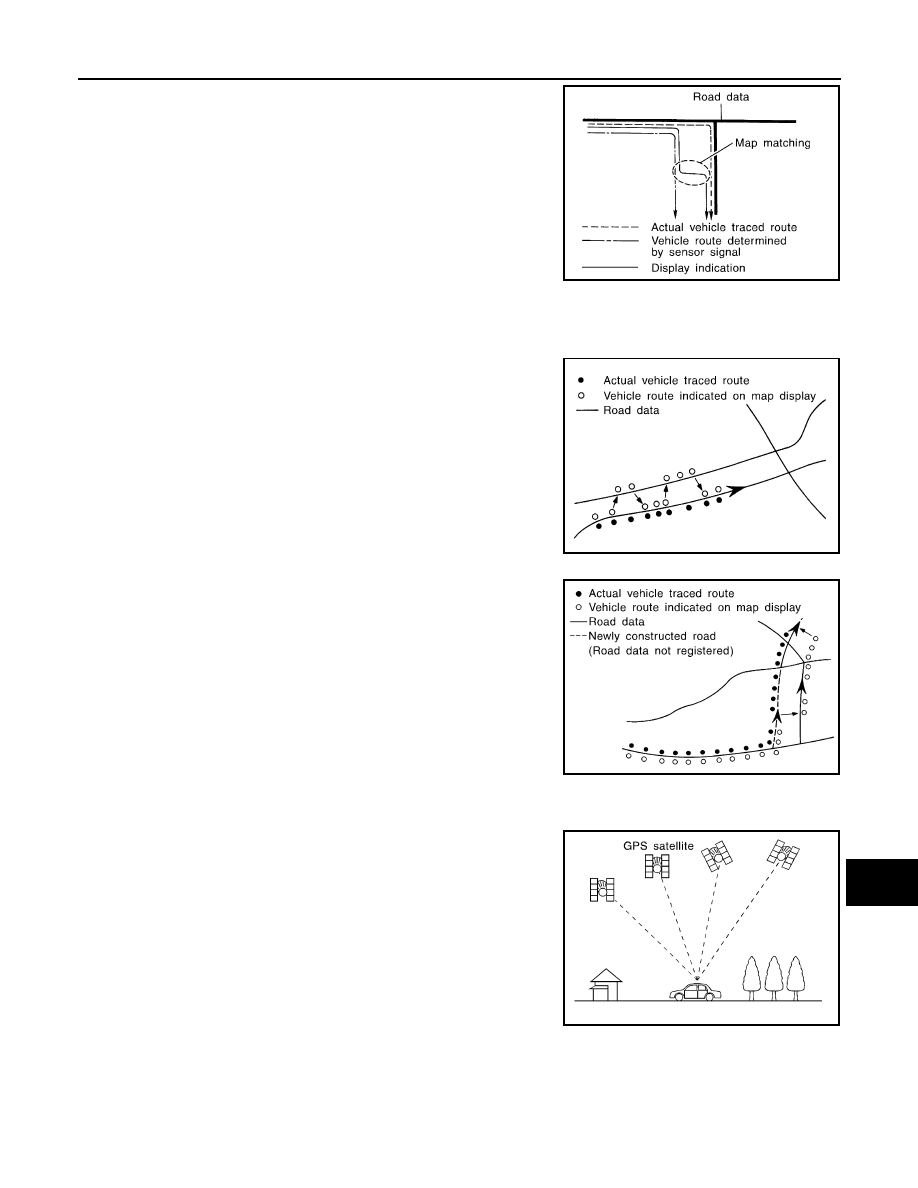
Map-matching repositions the vehicle on the road map when a new
location is judged to be more accurate. This is done by comparing
the current vehicle position (calculated by the normal position detec-
tion method) from the map data stored in the HDD (Hard Disk Drive).
There is a possibility that the vehicle position may not be corrected in the following case, and when vehicle is
driven over a certain distance or time in which GPS information is hard to receive. Correct manually the cur-
rent location mark on the screen.
• In map-matching, several alternative routes are prepared and pri-
oritized in addition to the road judged as currently driving on.
Therefore, due to errors in the distance and/or direction, an incor-
rect road may be prioritized, and the current location mark may be
repositioned to the incorrect road.
If two roads are running in parallel, they are of the same priority.
Therefore, the current location mark may appear on either of them
alternately, depending on maneuvering of the steering wheel and
configuration of the road, etc.
• Map-matching does not function correctly when road on which the
vehicle is driving is new, etc. and not recorded in the map data.
Also, map-matching does not function correctly when road pattern
stored in the map data and the actual road pattern are different due
to repair, etc.
Therefore, the map-matching function judges other road as a cur-
rently driving road if the road is not in the map, and displays the
current location mark on it. Later, the current location mark may be
repositioned to the road if the correct road is detected.
• Effective range for comparing the vehicle position and travel direc-
tion calculated by the distance and direction with the road data is
limited. Therefore, correction by map-matching is not possible
when there is an excessive gap between current vehicle position and the position on the map.
GPS (Global Positioning System)
GPS (Global Positioning System) is developed for and is controlled
by the US Department of Defense. The system utilizes GPS satel-
lites (NAVSTAR), transmitting out radio waves while flying on an orbit
around the earth at an altitude of approximately 21,000 km (13,049
mile).
The receiver calculates the travel position in three dimensions (lati-
tude/longitude/altitude) according to the time lag of the radio waves
that four or more GPS satellites transmit (three-dimensional position-
ing). The GPS receiver calculates the travel position in two dimen-
sions (latitude/longitude) with the previous altitude data if the GPS
receiver receives only three radio waves (two-dimensional position-
ing). GPS position correction is not performed while stopping the
vehicle.
Accuracy of the GPS will deteriorate under the following conditions:
• In two-dimensional positioning, GPS accuracy will deteriorate when altitude of the vehicle position changes.
• The position of GPS satellite affects GPS detection precision. The position detection may not be precisely
performed.
SEL685V
SEL686V
JSNIA0180GB
SEL526V