Toyota Sequoia (2018 year). Instruction - part 18
273
4-5. Using the driving support systems
4
Drivin
SEQUOIA_OM_USA_OM0C011U
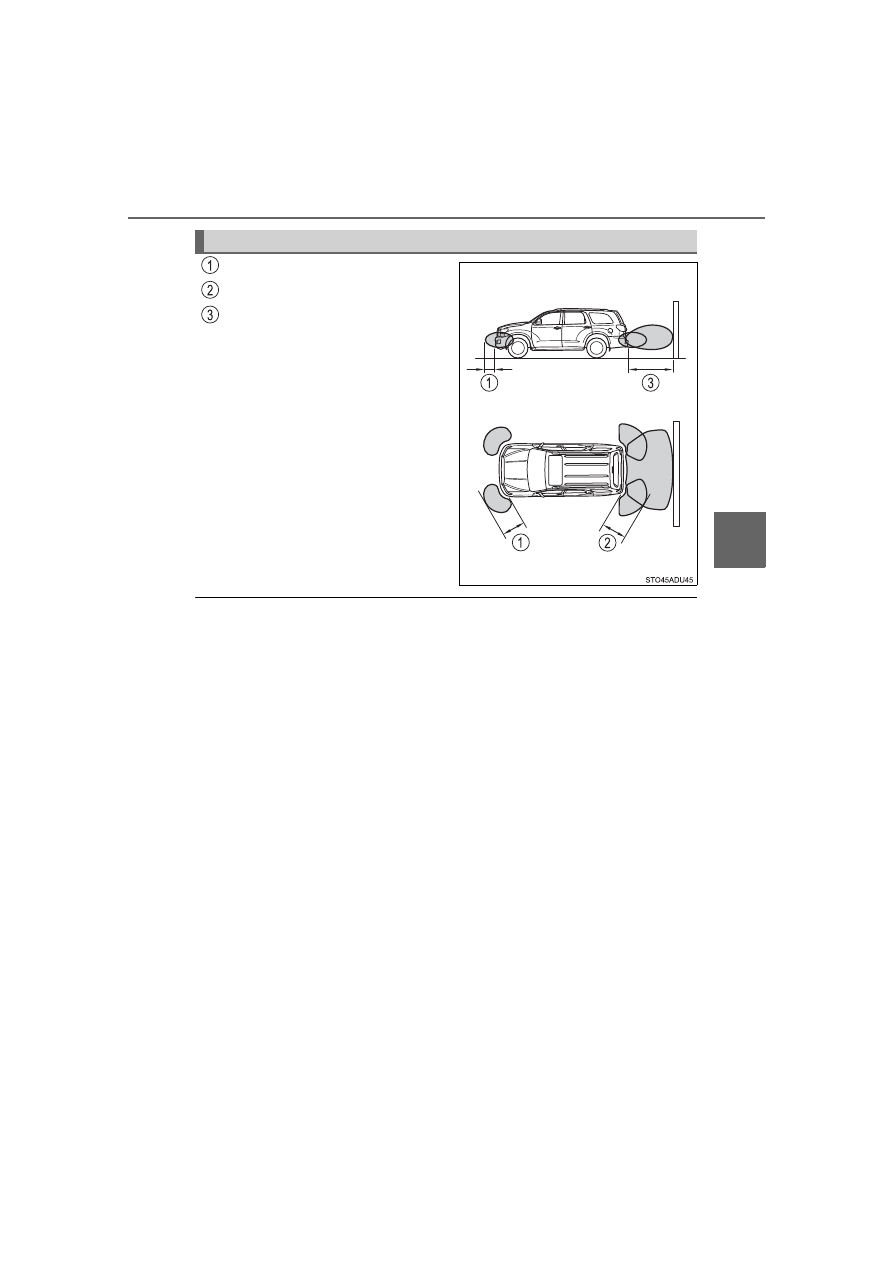
Approximately 2.0 ft. (60 cm)
Approximately 2.8 ft. (85 cm)
Approximately 5.9 ft. (180 cm)
The diagram shows the detection
range of the sensors. Note that the
sensors cannot detect obstacles
that are extremely close to the
vehicle.
The range of the sensors may
change depending on the shape of
the object, etc.
■
Intuitive parking assist can be operated when
●
Front corner sensors:
• The engine switch is in the “ON” position.
• The shift lever is in a position other than P.
• The vehicle speed is less than approximately 6 mph (10 km/h).
●
Rear corner and rear center sensors:
• The engine switch is in the “ON” position.
• The shift lever is in R.
Detection range of the sensors