содержание .. 1 2 3 4 5 6 7 8 9 10 ..
1.6
Устройство и работа комбайна зерноуборочного
КЗС-1218
1.6.1 Жатка для зерновых культур комбайна зерноуборочного КЗС-1218
В нижней части рамы жатки 4 (рисунок 1.2) установлены копирующие башмаки
7, на которые жатка опирается при работе с копированием рельефа поля,
при ремонте, хранении и обслуживании. Башмаки могут быть установлены в
одно из трех положений, обеспечивая необходимую высоту среза стеблей.
На жатке установлены прутковые делители 12.
Для уменьшения пассивной зоны между режущим аппаратом 5 и шнеком 6, а
также для предотвращения попадания камней в молотильный аппарат
комбайна, установлен съемный отбойник. Он необходим при уборке
низкостебельных культур.

1,2 - прутковый делитель
Рисунок 1.2 - Жатка для зерновых культур
1 - гидроцилиндр выноса мотовила;
2 - мотовило;
3, 11 - гидроцилиндры подъема мотовила по высоте;
4 - рама;
5- режущий аппарат;
6 - шнек;
7 - вариатор;
8 - копирующий башмак;
9 - исполнительный электромеханизм;
10 - угловая передача;
В процессе работы мотовила граблины 1 (рисунок 1.3)
могут занимать различное положение от плюс 15° (наклон вперед) до минус
30° (наклон назад).
Этот наклон граблин обеспечивается автоматически благодаря особой
конфигурации копира, закрепленного на поддержках, с которым
взаимодействует ролик 7 эксцентрикового механизма 9. Эксцентриковый
механизм обеспечивает заданный наклон граблин при вращении мотовила.
Наклон граблин изменяется автоматически при перемещении мотовила в
горизонтальном направлении (при выносе мотовила).
Для обеспечения нормального режима работы жатки при различных условиях
уборки мотовило имеет следующие технологические регулировки:
- по высоте - с помощью двух синхронно действующих гидроцилиндров
3 и 11 (рисунок 1.2);
- по выносу вперед - с помощью двух синхронно действующих гидроцилиндров
1.
Управление перемещением мотовила осуществляется из кабины комбайна
переключателем на рукоятке управления скоростью движения на блоке
управления.
Сегменты 2 (рисунок 1.4) режущего аппарата установлены попарно с
чередованием: насечка - вверх,
насечка - вниз.
Привод режущего аппарата осуществляется от угловой передачи 10 (рисунок
1.2).
Включение и изменение частоты вращения мотовила
осуществляется с помощью клиноременного вариатора 7, управляемого
исполнительным электромеханизмом 9.
Схема гидравлическая принципиальная управления гидроцилиндрами жатки
представлена в приложении А, рисунок А.1.
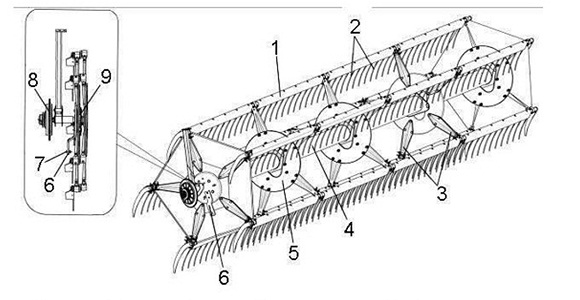
Рисунок 1.3- Мотовило
1 - граблина; 2 - зуб пружинный; 3 - луч;
4 - вал мотовила; 5 - диск; 6 - поводок; 7 - ролик; 8 - приводная
звездочка с предохранительной муфтой; 9 - эксцентриковый механизм

Рисунок 1.4 - Режущий аппарат
1, 3, 4- пластины трения; 2 - сегмент
На шнеке 1 (рисунок 1.5) имеются витки левого и
правого направлений, которые выполняют функции транспортера. Пальчиковый
механизм предназначен для подачи стеблевой массы на цепочно-планчатый
транспортер наклонной камеры комбайна. Управление пальчиковым механизмом
производится рычагом 2.
Стеблеподъемники служат для разделения и подъема путанных и полеглых
стеблей убираемой культуры перед их скашиванием. Стеблеподъемники
крепятся на пальцах режущего аппарата.
Транспортная тележка предназначена для перевозки жатки при транспортных
переездах по дорогам общего пользования. Жатка крепится на тележке с
помощью фиксаторов 6 (рисунок 1.6). При транспортных переездах комбайна
тележка, с установленной на ней жаткой, присоединяется к молотилке при
помощи тягового устройства
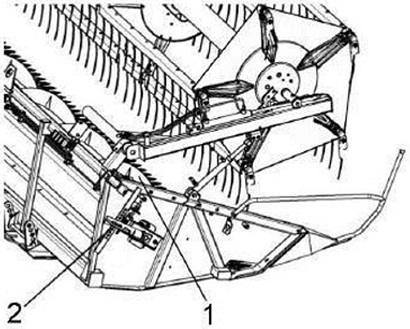
Рисунок 1.5-Жатка
1 - шнек; 2 - рычаг
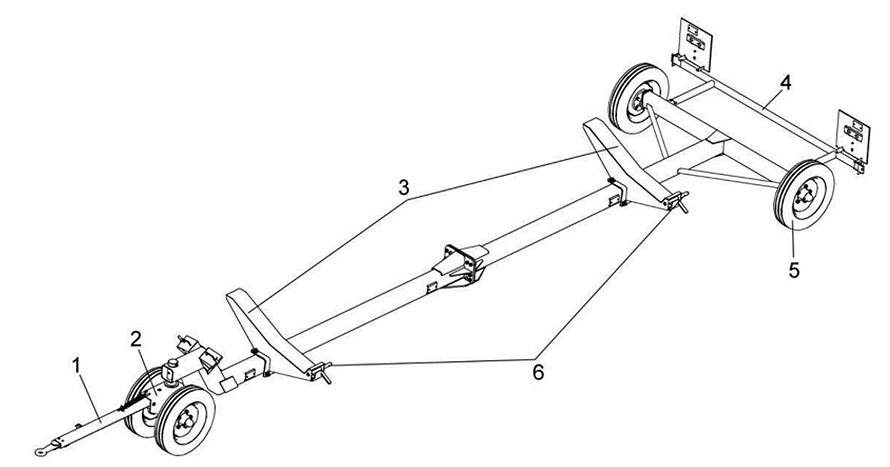
Рисунок 1.6 - Тележка транспортная
1 -дышло; 2 - ось передняя; 3 - лонжероны; 4
-балка габаритная; 5 - колесо; 6 - фиксаторы
содержание .. 1 2 3 4 5 6 7 8 9 10 ..