содержание .. 1 2 3 ..
МСУД (микропроцессорная система управления и диагностики). Руководство - часть 2
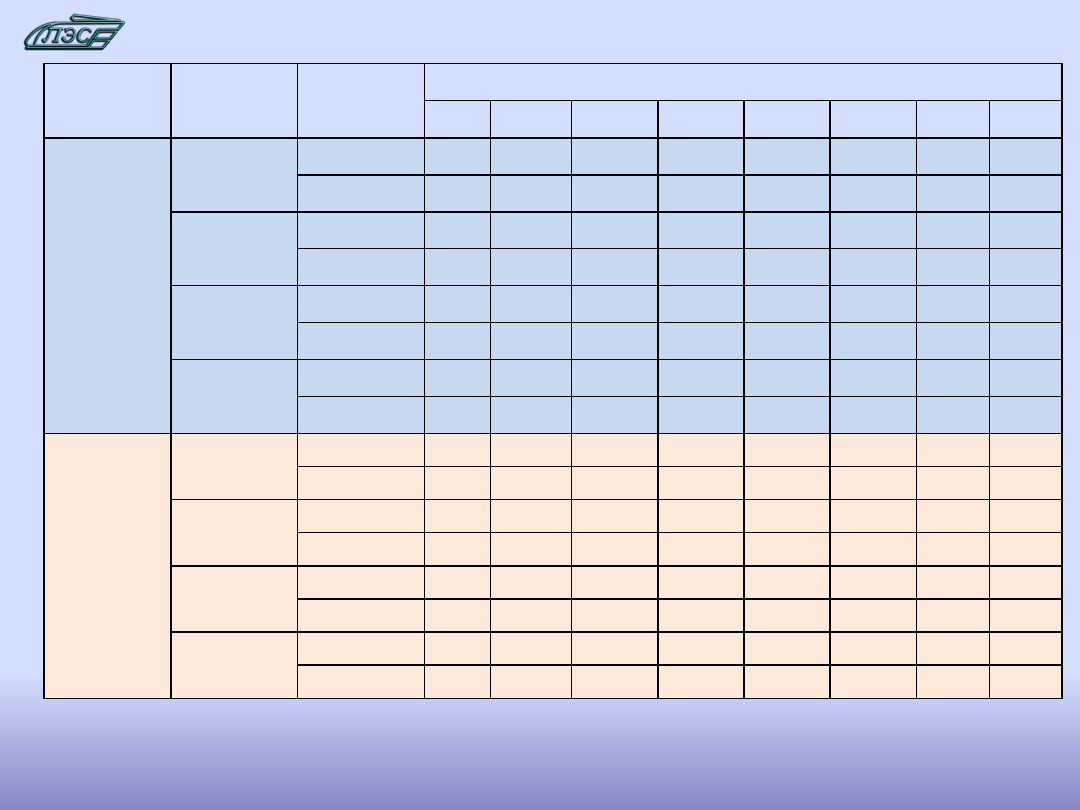
Алгоритм работы ВИП
Условные обозначения, принятые в таблице:
0
–
наименьший допустимый угол отпирания тиристоров;
03
– наименьший угол отпирания тиристоров, задержанный на значение
З
или
0
;
– угол опережения отпирания тиристоров;
р
– регулируемый угол открытия тиристоров.
Режим
работы
Номер
зоны
Полярность
полупериода
Плечи ВИП
V1
V2
V3
V4
V5
V6
V7
V8
Тяга
I
+
р
0
/
р
0
р
II
+
р
03
0
р
03
0
III
+
р
0З
0
р
03
0
IV
+
р
03
0
р
03
0
Рекуперация
IV
+
р
р
III
+
р
р
II
+
р
р
I
+
р
р
/
р
р
/
Алгоритм управления ВИП