Квадрокоптер DJI PHANTOM - руководство
А1 - Установка программного обеспечения и драйверов
Пожалуйста, убедитесь что у Вас последняя версия программного обеспечения "NAZA-M Assistant" (минимально допустимая версия - 2.0). Это необходимо для получения всех необходимых обновлений и правильной настройки конфигурации квадрокоптера. В противном случае, загрузите последнюю версию с сайта производителя DJI (www.dji-innovations.com).
-
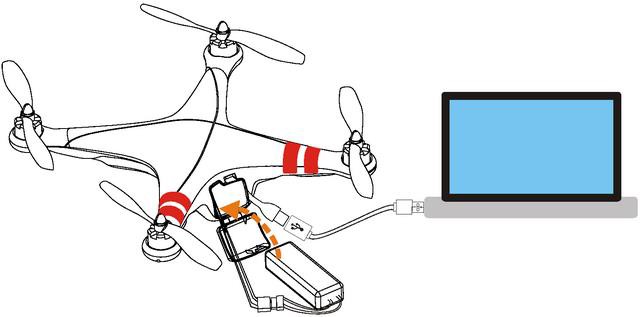
Подключите квадрокоптер к компьютеру через порт USB и включите бортовое питание квадрокоптера.
-
Запустите "DJI Driver Installer" и следуйте инструкциям на экране для первой установки драйверов.
-
Запустите "NAZA-M Assistant Software Installer" и следуйте инструкциям на экране для первой установки "NAZA-M Assistant".
А2 - Настройка конфигурации, обновление прошивки и программного обеспечения
-
Включите компьютер. Пожалуйста, убедитесь что имеется доступ к INTERNET.
-
Включите пульт управления, затем включите бортовое питание квадрокоптера. Подключите квадрокоптер к компьютеру через порт USB. НЕ ОТКЛЮЧАЙТЕ USB-кабель, пока не завершены настройка конфигурации и/или обновление программного обеспечения.
-
Пожалуйста, ознакомьтесь с шагом №3 "Сборка и настройка конфигурации" раздела руководства "Naza-M - Краткое руководство" для правильного использования "NAZA-M Assistant".
-
Пожалуйста, ознакомьтесь с Приложением "Прошивка и обновление NAZA-M Assistant" раздела руководства "Naza-M - Краткое руководство" для обновления прошивки квадрокоптера и/или программного обеспечения "NAZA-M Assistant".
-
Если необходимо использование режима "Ручное управление", пожалуйста, выберите пункт "Manual" из выпадающего списка в меню "Basic/RC/Control Mode Switch" в настройках конфигурации "NAZA-M Assistant". Ознакомьтесь с подробным описанием режима "Ручное управление"(шаг №1 "Тестовый полет" раздела руководства "Naza-M - Краткое руководство").
А3 - Установка связи пульта управления с приемником (биндинг).
Процедура связки пульта управления с приемником квадрокоптера, проведена на заводе-изготовителе. При необходимости, например замене пульта управления и/или приемника, Вы можете выполнить эту процедуру самостоятельно. По-умолчанию тип приемника - PPM.
Не используйте оригинальный пульт управления PHANTOM с оборудованием дистанционного управления других производителей.
Процедура связки пульта управления с приемником:
-
Пожалуйста, снимите корпус квадрокоптера, как указано в инструкции, раздел "А8 - Техническое обслуживание/Снятие корпуса".
-
Определите место расположения приемника, как показано на рисунке.
-
После включения питания пульта управления и бортового питания квадрокоптера, если индикатор на плате приемника горит красным, это значит, что приемник не установил связь с пультом управления.
-
Нажмите и удерживайте более 2-х секунд кнопку "Связь" на плате приемника, пока индикатор начнет мигать, затем отпустите кнопку.
-
Установите рычаг газа на пульте управления в минимальное (нижнее) положение и включите пульт управления. Если индикатор на плате приемника погас, значит связь "пульт управления-приемник" - установлена. Установка связи возможна, только когда индикатор пульта управления мигает красным сразу после включения питания.

На заметку:
-
если пульт управления не может выйти в режим готовности для связки с приемником, пожалуйста, проверьте, что рычаг газа находится в нижнем положении.
-
Вы можете полноценно использовать пульт управления только после правильного завершения процедуры установки связи.
А4 - Изменение раскладки управления на пульте управления
Вы можете изменять раскладку управления на пульте управления (Mode1 / Mode2) для своего удобства, если это необходимо. Если раскладка управления на пульте управления была изменена, обязательно необходимо сделать калибровку пульт управления (пункт А5 "Калибровка пульта управления").
Описание раскладок управления:
Mode1:
-
Газ, рычаг не возвращается в центральное положение, когда отпущен.
-
Крен, рычаг возвращается в центральное положение, когда отпущен.
-
Тангаж, рычаг возвращается в центральное положение, когда отпущен.
-
Рысканье, рычаг возвращается в центральное положение, когда отпущен.
Mode2:
-
Газ, рычаг не возвращается в центральное положение, когда отпущен.
-
Крен, рычаг возвращается в центральное положение, когда отпущен.
-
Тангаж, рычаг возвращается в центральное положение, когда отпущен.
-
Рысканье, рычаг возвращается в центральное положение, когда отпущен.
Процедура изменения раскладки управления:
-
Снимите пластину трещотки газа (5) и открутите крепежный шестигранник трещотки (4). Закрутите крепежный шестигранник трещотки (4) в противоположное, по диагонали, крепежное отверстие (9) и закрепите пластину трещотки газа с противоположной стороны на крепежном шестиграннике (4) и стойке (1). Вращая крепежный винт на шестиграннике трещотки (4) отрегулируйте плавность хода рычага газа.
-
Снимите прижимную пружину (8) и центрирующую балку (2) и закрепите их на противоположной позиции в обратном порядке. С помощью крепежного винта (3) центрирующей балки, отрегулируйте плавность хода рычага Тангажа/Рысканья. (Будьте особенно внимательны и осторожны, при снятии/закреплении прижимной пружины, чтобы не потерять и не повредить ее, контролируйте натяжение пружины).
-
Поменяйте местами подключение разъемов канала 2 (AIN2) и канала 3 (AIN3). (Будьте внимательны с правильным направлением разъемов при подключении).
Условные обозначения:
-
- Крепежная стойка
-
- Центрирующая балка 3 - Крепежный винт
4 - Крепежный шестигранник трещотки 5 - Пластина трещотки газа
6 - 3-й канал 7 - 2-й канал
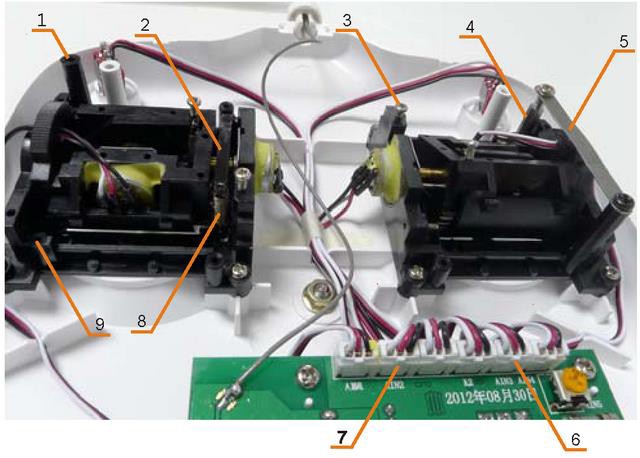
8 - Прижимная пружина 9 - Крепежное отверстие
На рисунке ниже показан результат правильного изменения раскладки управления с Mode 2 на Mode 1

А5 - Калибровка пульта управления

Если была изменена раскладка управления пульта управления или калибровка пульта управления не проводилась длительное время, необходимо выполнить повторную калибровку.
CL - Удержание курса
HL - Удержание точки взлета
Процедура калибровки пульта управления
-
Установите переключатель S2 в позицию OFF, а переключатель S1 в позицию GPS.
-
Переместите рычаг газа и рычаг тангажа в верхнюю позицию (максимальный газ + максимальный наклон вперед). Удерживайте рычаг тангажа в верхней позиции вручную, т.к., рычаг вернется в центральное
положение если отпустить его.
-
Включите пульт управления, в этот момент Вы услышите повторяющийся звуковой сигнал пульта управления "Ди---Ди Ди". Установите переключатель S2 в позицию CL, Вы услышите звуковой сигнал "Ди", это означает что пульт управления перешел в режим калибровки. (Во время выполнения вышеуказанных пунктов, оба рычаги газа и тангажа должны находится в верхней позиции).
-
Отпустите рычаг тангажа и передвиньте рычаг газа в центральную позицию (газ 50%). Установите переключатель S1 в позицию ATTI, Вы услышите звук "Ди". После сигнала, подвигайте обоими рычагами по окружности несколько раз для фиксирования максимальных точек отклонения рычагов от центрального положения. После этого опустите рычаг газа в нижнее положение (газ 0%) и установите переключатель S2 в позицию HL, Вы услышите звуковой сигнал "Ди", пульт управления несколько раз мигнет индикатором и выйдет в рабочий режим управления, процедура калибровки завершена успешно.
А6 - Установка камеры и подвеса.
В случае необходимости, Вы можете установить на квадрокоптер фото/видео камеру с помощью специального подвеса, который входит в комплект поставки квадрокоптера PHANTOM.
-
Установите камеру на подвес, как показано на рисунке
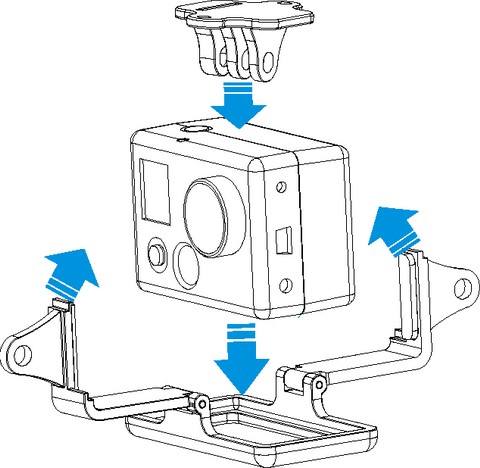
-
Закрепите подвес с камерой на квадрокоптере.
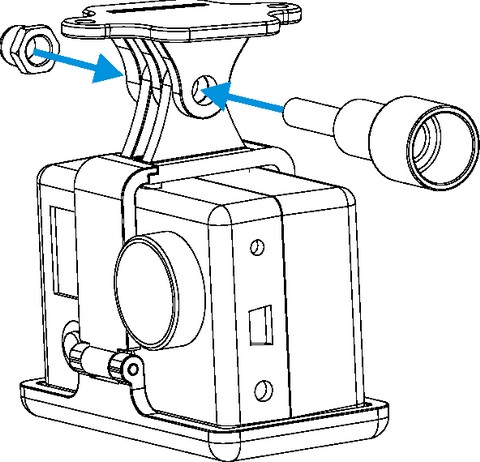

Убедитесь, что используются соответствующие крепежные винты М3,0*6. Внимание!!! Если использовать более длинные крепежные винты, можно повредить силовой аккумулятор, что может привести к возгоранию и пожару, а также может вывести из строя квадрокоптер.
А7 Интеллектуальное управление полетом (IOC)
(возможно только с использованием компаса и модуля GPS)
По-умолчанию интеллектуальное управление отключено. Для того, чтобы активировать возможности интеллектуального управления, необходимо включить эту функцию в настройках "NAZA-M Assistant". Определение направления движения "Вперед": квадрокоптер будет летать только в этом направлении, когда задействован рычаг Тангажа.
Графические обозначения:

Перед тем, как начать
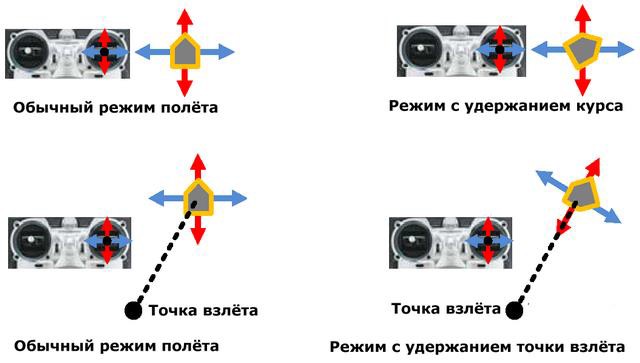
Обычно, направление движения "вперед" совпадает с направлением носовой части квадрокоптера, т.е., квадрокоптер, обычно летит вперед носовой частью. При использовании режимов IOC направление движения "вперед" могут не совпадать с направлением носовой части квадрокоптера.
-
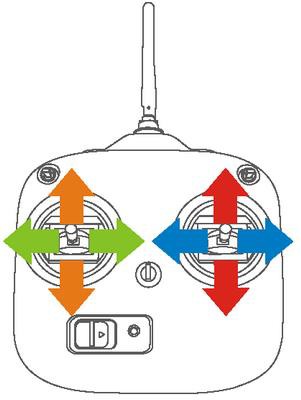
в режиме Удержания Курса (CL) - направление движения "вперед" совпадает с записанным на направлением движения носовой части квадрокоптера. Обратите внимание на рисунок (красные и синие стрелки на пульте управления соответствуют командам Тангажа (вперед/назад) и Крена (левый/правый крены):
-
в режиме Удержания Точки Взлета (HL) - направление движения "вперед" совпадает с направлением вектора от записанной точки взлета до точки нахождения квадрокоптера в текущий момент. Посмотрите на рисунок (красные и синие стрелки на пульте управления соответствуют командам Тангажа (вперед/назад) и
Крена (левый/правый крены):
Запись направления движения "вперед" и фиксация точки взлета
Если вы используете функции интеллектуального управления полетом, всегда необходимо помнить направление движения "вперед" в режиме Удержания Курса и точку взлета в режиме Удержания Точки Взлета. Есть два варианта записи направления "вперед" и точки взлета: вручную и автоматически. Вы можете выбрать любой, наиболее подходящий для вас.
Важно помнить!
Направление носовой части квадрокоптера запоминается автоматически через 30 секунд после включения квадрокоптера. Перед взлетом текущая позиция квадрокоптера будет автоматически записана как точка взлета, в момент когда вы начнете двигать рычаг газа (действительно только если перед взлетом модуль GPS обнаружил не менее 6 спутников);
Если Вы быстро начнете менять положение переключателя S2 между позициями OFF и CL (3-5 раз) текущее положение носовой части квадрокоптера будет записано как новое направление движения "вперед" (в течение 30-ти секунд после включения питание квадрокоптера OFF->CL->OFF единовременно). Если обнаружены 6 или более спутников GPS вы можете быстро изменить положение переключателя S2 между
позициями CL и HL (3-5 раз) для записи текущей позиции квадрокоптера как новой точки взлета (CL->HL->CL).
Тестирование интеллектуального управления полетом
Проверьте режимы интеллектуального управления полетом следующим образом:

Особенности режимов интеллектуального управления
-
Индикатор состояния будет быстро мигать зеленым если запись произошла успешно. Индикатор состояния
будет медленно мигать попеременно желтым и зеленым только в интеллектуальном режиме управления, если квадрокоптер находится в состоянии готовности к полету в режимах Удержания Курса и Удержания Точки Взлета.
-
Для полета в режиме Удержания Точки Взлета необходимо, чтобы GPS модуль обнаружил не менее 6-ти спутников и квадрокоптер находился дальше 10 метров от точки взлета.
-
До перехода в режим Удержания Точки Взлета, необходимо отлететь на квадрокоптере дальше 10-ти метров от точки взлета, а затем перевести выключатель S2 в позицию HL и летать на квадрокоптере с активным режимом Удержания Точки Взлета. Если во время полета, вы впервые включили режим Удержания Точки Взлета (HL), когда квадрокоптер находился в радиусе меньше 10-ти метров от точки взлета, при этом все условия подходят для полета в режиме HL, квадрокоптер автоматически перейдет в этот режим, когда преодолеет дистанцию в 10 метров от первоначальной точки взлета.
-
Во время полета в режиме HL, квадрокоптер автоматически выйдет из режима HL и переключится в режим CL (будет летать вдоль ранее записанного направления носовой части квадрокоптера), если произойдет одно из нижеописанных событий:
-
Квадрокоптер вошел в зону полетов в радиусе менее 10-ти метров от точки взлета;
-
Вы активировали полетный режим - ATTI;
-
Ухудшились условия приема GPS сигналов (индикатор состояния 2/3-х кратно мигает красным).
-
-
Во время полета, когда квадрокоптер находится далеко от Вас и от точки взлета, пожалуйста, не делайте многократных, быстрых переключений переключателем IOS (OFF-CL-HL), во избежание произвольной записи новой точки взлета и нового направления носовой части квадрокоптера.
-
Вы должны четко понимать, какой из полетных режимов вы используете, где находится точка первоначального взлета и какое направление носовой части записано в памяти квадрокоптера, перед тем, как активировать интеллектуальное управление полетом (IOC).
-
Продолжительно, быстрое вращение квадрокоптера (пируэт) может привести к возникновению ошибок в управлении рысканьем (направлением курса) квадрокоптера. В этом случае необходимо остановить или замедлить выполнение пируэта, и таким образом стабилизировать полетные характеристики квадрокоптера.
А8 Техническое обслуживание
1. Разборка корпуса
-
Окрутите и снимите несущие пропеллеры квадрокоптера;
-
Используя подходящий для этого инструмент, открутите указанные на рисунке крепежные винты и снимите корпус.
Заметки
-
-
Пожалуйста, храните мелкие запчасти, например крепежные винты, в определенном, недоступном для детей месте;
-
ВООБЩЕ НЕ ИСПОЛЬЗУЙТЕ фиксатор резьбовых соединений, это может привести к повреждению корпуса и других компонентов квадрокоптера.

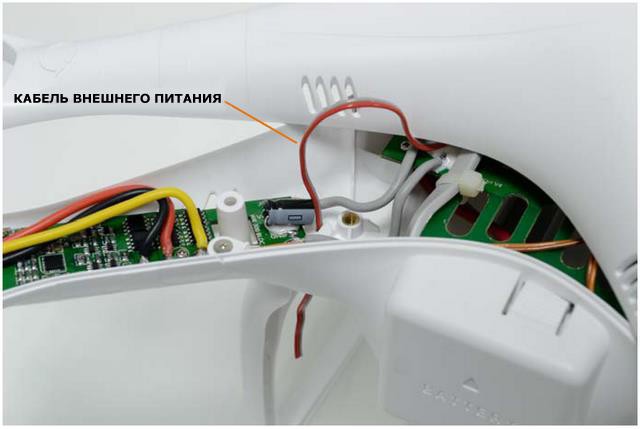
2. Внешнее питание
На квадрокоптере установлен специальный кабель для вывода питания наружу, в случае необходимости подключения дополнительного оборудования. Напряжение на этом кабеле, соответствует напряжению силового аккумулятора квадрокоптера. Красный провод соответствует положительному полюсу (+), серый отрицательному (-). Красный и серый провода не должны соприкасаться, во избежание короткого замыкания. Кабель для вывода внешнего питания