ТРМ212 Измеритель ПИД-регулятор двухканальный. Руководство по эксплуатации

ТРМ212
Измеритель ПИД-регулятор
двухканальный
Руководство по эксплуатации
Содержание
Предупреждающие сообщения
6
Введение
7
Используемые аббревиатуры
8
Соответствие символов ЦИ буквам латинского алфавита
8
1 Назначение и функции
9
2 Технические характеристики и условия эксплуатации
10
2.1 Технические характеристики
10
2.2 Условия эксплуатации
14
3 Меры безопасности
15
4 Монтаж
16
4.1 Установка прибора настенного крепления H
16
4.2 Установка прибора настенного крепления Н2
17
4.3 Установка прибора щитового крепления Щ1
21
4.4 Установка прибора щитового крепления Щ2
24
5 Подключение
25
5.1 Рекомендации по подключению
25
5.2 Первое включение
27
5.3 Назначение контактов клеммника
28
5.4 Подключение по интерфейсу RS-485
29
5.5 Подключение датчиков
30
5.5.1 Общие сведения
30
5.5.2 Подключение ТС по трехпроводной схеме
31
5.5.3 Подключение ТС по двухпроводной схеме
32
5.5.4 Подключение ТП
33
5.5.5 Подключение датчиков c унифицированным выходным сигналом тока или напряжения
33
5.5.6 Подключение датчика положения
35
5.6 Подключение нагрузки к ВУ
35
2
5.6.1 Подключение нагрузки к ВУ типа Р
36
5.6.2 Подключение нагрузки к ВУ типа К
36
5.6.3 Подключение нагрузки к ВУ типа Т
37
5.6.4 Подключение нагрузки к ВУ типа С
37
5.6.5 Подключение нагрузки к ВУ типа С3
38
5.6.6 Подключение нагрузки к ВУ типа И
40
5.6.7 Подключение нагрузки к ВУ типа У
41
6 Эксплуатация
42
6.1 Принцип работы
42
6.2 Управление и индикация
43
6.3 Включение и работа
46
6.4 Регулирование
47
6.4.1 Режим автоматического управления регулятором
47
6.4.2 Режим дистанционного управления регулятором
49
6.4.3 Режим ручного управления регулятором
50
7 Настройка
52
7.1 Последовательность настройки
52
7.2 Установка параметров входа
54
7.2.1 Код типа датчика
54
7.2.2 Установка точности вывода температуры
54
7.2.3 Установка диапазона измерения
55
7.2.4 Вычисление квадратного корня
56
7.2.5 Коррекция измерительной характеристики датчика
57
7.2.6 Установка параметров цифрового фильтра
60
7.3 Установка параметров процесса регулирования
62
7.3.1 Параметры вычислителя
63
7.3.2 Параметры графика коррекции уставки
64
7.3.3 Задание диапазона уставки
66
7.3.4 Установка способа управления
66
7.4 Настройка ПИД-регулятора
67
3
7.4.1 Общие принципы ПИД-регулирования
67
7.4.2 Параметры настройки
68
7.4.3 Автонастройка
72
7.4.4 Ручная подстройка ПИД-регулятора
75
7.4.5 Пример ручной настройки ПИД-регулятора
77
7.5 Настройка компаратора и устройства LBA
80
7.5.1 Настройка компаратора
80
7.5.2 Сигнализация об обрыве в контуре регулирования
85
7.6 Установка параметров задвижки
87
7.7 Настройка режимов индикации
88
7.8 Настройка обмена данными через интерфейс RS-485
90
7.8.1 Работа с параметрами по протоколу ОВЕН
91
7.8.2 Работа с параметрами по протоколу ModBus
91
7.9 Защита от несанкционированного доступа
92
7.9.1 Защита параметров от просмотра
92
7.9.2 Защита параметров от изменения
92
7.9.3 Защита отдельных параметров от просмотра и изменений
92
7.10 Восстановление заводских установок
93
8 Техническое обслуживание
93
8.1 Общие указания
93
8.2 Юстировка
94
8.2.1 Вычисление коэффициентов юстировки
94
8.2.2 Юстировка прибора для работы с ТС
96
8.2.3 Юстировка прибора для работы с ТП
97
8.2.4 Юстировка прибора для измерения сигналов постоянного тока и напряжения
99
8.2.5 Юстировка датчика температуры свободных концов ТП
101
8.2.6 Юстировка датчика положения задвижки
103
8.2.7 Юстировка выходных устройств типа «И» и «У»
104
9 Маркировка
105
10 Упаковка
106
4
11 Транспортирование и хранение
106
12 Комплектность
107
13 Гарантийные обязательства
107
Приложение А. Настраиваемые параметры
109
Приложение Б. Возможные неисправности и способы их устранения
120
5
Предупреждающие сообщения
В данном руководстве применяются следующие предупреждения:
ОПАСНОСТЬ
Ключевое слово ОПАСНОСТЬ сообщает о непосредственной угрозе опасной ситуации, которая
приведет к смерти или серьезной травме, если ее не предотвратить.
ВНИМАНИЕ
Ключевое слово ВНИМАНИЕ сообщает о потенциально опасной ситуации, которая может
привести к небольшим травмам.
ПРЕДУПРЕЖДЕНИЕ
Ключевое слово ПРЕДУПРЕЖДЕНИЕ сообщает о потенциально опасной ситуации, которая может
привести к повреждению имущества.
ПРИМЕЧАНИЕ
Ключевое слово ПРИМЕЧАНИЕ обращает внимание на полезные советы и рекомендации, а также
информацию для эффективной и безаварийной работы оборудования.
Ограничение ответственности
Ни при каких обстоятельствах ООО «Производственное объединение ОВЕН» и его контрагенты не будут нести
юридическую ответственность и не будут признавать за собой какие-либо обязательства в связи с любым ущербом,
возникшим в результате установки или использования прибора с нарушением действующей нормативно-технической
документации.
6

Введение
Настоящее Руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с
устройством, принципом действия, конструкцией, технической эксплуатацией и обслуживанием измерителя
ПИД-регулятора двухканального ТРМ212, в дальнейшем по тексту именуемого «прибор» или «ТРМ212».
Подключение, регулировка и техобслуживание прибора должны производиться только квалифицированными
специалистами после прочтения настоящего руководства по эксплуатации.
Прибор изготавливается в различных модификациях, зашифрованных в коде полного условного обозначения.
Тип корпуса:
Н - корпус настенного крепления;
Н2 - корпус настенного крепления;
Щ1 - корпус щитового крепления;
Щ2 - корпус щитового крепления.
Тип встроенного ВУ1(2):
Р - Контакты электромагнитного реле;
К - Оптопара транзисторная n-p-n-типа;
Т - Выход для управления внешним твердотельным реле;
С - Оптопара симисторная;
И - ЦАП «параметр - ток»;
У - ЦАП «параметр - напряжение».
Пример записи обозначения прибора в документации другой продукции, где он может быть применен:
Измеритель ПИД-регулятор двухканальный ТРМ212-Н.РИ ТУ 4217-026-46526536-2011.
7
Используемые аббревиатуры
ВУ - выходное устройство
ИМ - исполнительный механизм
НСХ - номинальная статическая характеристика
ПИД - пропорционально-интегрально-дифференциальный (закон или регулятор)
ТП - преобразователь термоэлектрический (термопара)
ТС - термопреобразователь сопротивления
ТУ - технические условия
ЦАП - цифроаналоговый преобразователь
PV - измеряемая величина (process value)
SP - уставка регулятора (set point)
LBA - тревога обрыва контура (loop break alarm)
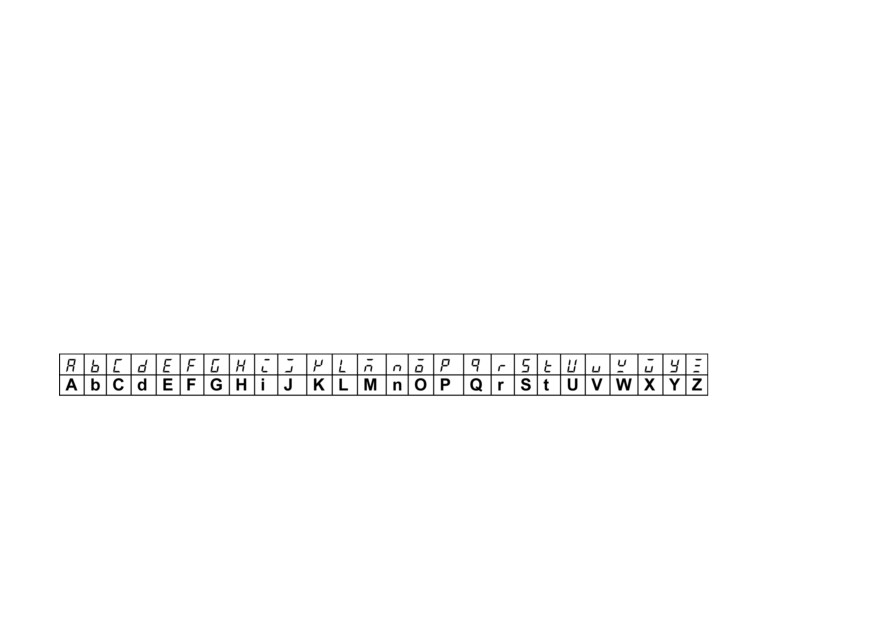
Соответствие символов ЦИ буквам латинского алфавита
8
1 Назначение и функции
Прибор предназначен для измерения и автоматического регулирования температуры (при использовании в
качестве датчиков ТС или ТП), а также других физических параметров, значение которых может быть
преобразовано датчиками в унифицированный сигнал постоянного тока или напряжения. Информация о
любом из измеренных физических параметров отображается в цифровом виде на встроенном
четырехразрядном ЦИ.
Прибор соответствует ГОСТ Р 52931- 2008 и относится к изделиям государственной системы промышленных
приборов и средств автоматизации.
Прибор зарегистрирован в Государственном реестре средств измерений.
Прибор может быть применен на промышленных объектах, подконтрольных Ростехнадзору.
Прибор позволяет выполнять следующие функции:
• измерение температуры и других физических величин (давления, влажности, расхода, уровня и т. п.) в
двух различных точках с помощью датчиков;
• обработку входных сигналов:
- цифровую фильтрацию и коррекцию;
- масштабирование унифицированного сигнала для отображения на ЦИ физической величины;
- вычисление и индикацию квадратного корня из измеряемой величины;
- вычисление разности, суммы, отношения и корня из разности двух измеряемых величин.
• ПИД-регулирование измеренной или вычисленной величины в системе с запорно-регулирующим или
трехходовым клапаном в автоматическом, ручном и дистанционном режимах;
• коррекцию уставки регулятора в зависимости от внешнего параметра;
• автонастройку ПИД-регулятора на объекте;
• дистанционное управление процессом регулирования (запуск/остановка);
• определение аварийной ситуации (ошибки на входе, обрыв в контуре регулирования);
• регистрацию данных на ПК и конфигурирование прибора с компьютера через интерфейс RS-485.
9

2 Технические характеристики и условия эксплуатации
2.1 Технические характеристики
Таблица 2.1 - Характеристики прибора
Наименование
Значение
Диапазон переменного напряжения питания для всех типов
корпусов:
• напряжение
90...264 В
• частота
47…63 Гц
Потребляемая мощность (для приборов с переменным
не более 6 ВА
напряжением питания)
Количество каналов
2
Основной вход
Время опроса входа
не более 1 с
Предел основной приведенной погрешности при измерении:
• термометрами сопротивления
± 0,25 %
• для остальных видов сигналов
± 0,5 %
Входное сопротивление прибора при подключении
источника унифицированного сигнала:
• тока (при подключении внешнего прецизионного
100 Ом ± 0,1 %
резистора)
• напряжения
не менее 100 кОм
Дополнительный вход
Входное сопротивление прибора при подключении
источника унифицированного сигнала:
10

Продолжение таблицы 2.1
Наименование
Значение
• «замкнуто»
от 0 до 1 кОм
• «разомкнуто»
более 100 кОм
Характеристики корпуса
Степень защиты корпуса:
• настенный Н
IP44
• настенный Н2
IP20
• щитовые Щ1, Щ2 (со стороны лицевой панели)
IP54
Габаритные размеры прибора:
• настенный Н
(130 × 105 × 65) ± 1 мм
• настенный Н2
(150 × 105 × 35) ± 1 мм
• щитовой Щ1
(96 × 96 × 70) ± 1 мм
• щитовой Щ2
(96 × 48 × 100) ± 1 мм
Масса прибора
не более 0,5 кг
Средний срок службы
8 лет
Интерфейс связи
Тип интерфейса
RS-485
Скорость передачи данных
2,4; 4,8; 9,6; 14,4; 19,2; 28,8; 38,4; 57,6; 115,2 кбит/с
Тип кабеля
Экранированная витая пара
Тип протокола передачи данных
ОВЕН, Modbus RTU (Slave), Modbus ASCII (Slave)
11

Таблица 2.2 - Датчики и входные сигналы
Датчик или входной сигнал
Диапазон измерений
Значение единицы
Предел основной
младшего разряда*
приведенной
погрешности,
ТС и ТП по ГОСТ 6651-2009
Cu 50 (α = 0,00426 °С-1)
-50…+200 °С
0,1 °С
50М (α = 0,00428 °С -1)
-180…+200 °С
0,1 °С
Pt 50 (α = 0,00385 °С -1)
-200…+750 °С
0,1; 1,0 °С
50П (α = 0,00391 °С -1)
-240…+750 °С
0,1; 1,0 °С
± 0,25 %
Cu 100 (α = 0,00426 °С -1)
-50…+200 °С
0,1 °С
100М (α = 0,00428 °С -1)
-180…+200 °С
0,1 °С
Pt 100 (α = 0,00385 °С -1)
-200…+750 °С
0,1; 1,0 °С
100П (α = 0,00391 °С -1)
-200…+750 °С
0,1; 1,0 °С
Нестандартизированные термопреобразователи сопротивления
53М (α = 0,00426 °С -1) (гр. 23)
-50 … +200
0,1 °С
± 0,25 %
46П (α = 0,00428 °С -1) (гр. 21)
-200 … +650
Термоэлектрические преобразователи по ГОСТ Р 8.585-2001
TХК (L)
-200…+800 °С
0,1; 1,0 °С
TЖК (J)
-200…+1200 °С
0,1; 1,0 °С
TНН (N)
-200…+1300 °С
0,1; 1,0 °С
TХА (К)
-200…+1300 °С
0,1; 1,0 °С
± 0,5 % (± 0,25 %)
TПП (S)
-50…+1750 °С
0,1; 1,0 °С
TПП (R)
-50…+1750 °С
0,1; 1,0 °С
TПР (В)
+200…+1800 °С
0,1; 1,0 °С
12
Продолжение таблицы 2.2
Датчик или входной сигнал
Диапазон измерений
Значение единицы
Предел основной
младшего разряда*
приведенной
погрешности,
TВР (А-1)
0…+2500 °С
0,1; 1,0 °С
TВР (А-2)
0…+1800 °С
0,1; 1,0 °С
TВР (А-3)
0…+1800 °С
0,1; 1,0 °С
TМК (Т)
-250…+400 °С
0,1; 1,0 °С
Унифицированные сигналы по ГОСТ 26.011-80
0...1 В
0...100 %
0,1; 1,0 %
–50...+50 мВ
0...100 %
0,1; 1,0 %
± 0,25 %
0...5 мА
0...100 %
0,1; 1,0 %
0...20 мА
0...100 %
0,1; 1,0 %
± 0,25 %
4...20 мА
0...100 %
0,1; 1,0 %
* При температурах выше +1000 °С и ниже минус 200 °С цена единицы младшего разряда равна
1 °С.
Таблица 2.3 - Параметры встроенных ВУ
Обозначение ВУ
Тип выходного элемента
Технические параметры
ВУ дискретного типа
Р
Электромагнитное реле1)
При напряжении ~220 В (50 или 60 Гц, cos(φ) > 0,4) или =30 В.
Корпуса Н, Щ1, Щ2
Корпус Н2
ПИД-регулирование
Ток не более 1 А
Ток не более 1 А (не меняется)
Двухпозиционное
Ток не более 8 А
Ток не более 3 А (меняется)
регулирование
13
Продолжение таблицы 2.3
Обозначение ВУ
Тип выходного элемента
Технические параметры
К
Оптопара транзисторная n-p-n-
Постоянный ток не более 200 мА при напряжении постоянного
типа
тока не более 40 В
Т
Выход для управления внешним
Выходное напряжение 4…6 В, постоянный ток не более 60 мА
твердотельным реле
С
Оптопара симисторная2)
Ток не более 0,5 А3) при переменном напряжении не более 240 В
(50 Гц)
ВУ аналогового типа
И
ЦАП «параметр - ток»
Постоянный ток 4…20 мА на внешней нагрузке не более 1 кОм,
напряжение питания 15…32 В
У
ЦАП «параметр - напряжение»
Постоянное напряжение 0…10 В на внешней нагрузке более
2 кОм, напряжение питания 15…32 В
1) Электрическая прочность реле при максимальной нагрузке 106 переключений.
2) Характеристики приведены для оптопары, управляющей мощными тиристорами.
3) При работе симисторной оптопары в непрерывном режиме ток нагрузки не должен превышать 50 мА.
2.2 Условия эксплуатации
Прибор предназначен для эксплуатации при следующих условиях:
• закрытые взрывобезопасные помещения без агрессивных паров и газов;
• температура окружающего воздуха от +1 до +50 °С;
• верхний предел относительной влажности воздуха: не более 80 % при +35 °С и более низких
температурах без конденсации влаги;
• атмосферное давление от 84 до 106,7 кПа.
14
По устойчивости к электромагнитным воздействиям и по уровню излучаемых радиопомех прибор
соответствует оборудованию класса А по ГОСТ 51522-1999 (МЭК 61326-1).
По устойчивости к механическим воздействиям при эксплуатации прибор соответствует группе исполнения N2
по ГОСТ Р 52931-2008.
По устойчивости к климатическим воздействиям при эксплуатации прибор соответствует группе исполнения В4
по ГОСТ Р 52931-2008.
ПРЕДУПРЕЖДЕНИЕ
Требования в части внешних воздействующих факторов являются обязательными, т. к. относятся к
требованиям безопасности.
3 Меры безопасности
ОПАСНОСТЬ
На клеммнике присутствует опасное для жизни напряжение величиной до 250 В. Любые
подключения к прибору и работы по его техническому обслуживанию следует производить только при
отключенном питании прибора.
По способу защиты от поражения электрическим током прибор соответствует классу II по ГОСТ 12.2.007.0-75.
Во время эксплуатации, технического обслуживания и поверки прибора следует соблюдать требования
ГОСТ 12.3.019-80, Правил эксплуатации электроустановок потребителей и Правил охраны труда при
эксплуатации электроустановок потребителей.
Не допускается попадание влаги на контакты выходного разъема и внутренние электроэлементы прибора.
Прибор запрещено использовать в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел
и т. п.
15

4 Монтаж
4.1 Установка прибора настенного крепления H
Для установки прибора следует:
1. Закрепить кронштейн тремя винтами М4 × 20 на
поверхности, предназначенной для установки
прибора (см. рисунок 4.2).
ПРИМЕЧАНИЕ
Винты для крепления кронштейна не входят
в комплект поставки.
2. Зацепить крепежный уголок на задней стенке прибора
за верхнюю кромку кронштейна.
3. Прикрепить прибор к кронштейну винтом из
комплекта поставки.
Демонтаж прибора следует производить в обратном
порядке.
ПРЕДУПРЕЖДЕНИЕ
Провода подключаются при снятой крышке
прибора. Для удобства подключения следует
зафиксировать основание прибора на кронштейне
крепежным винтом.
Рисунок 4.1 - Монтаж прибора настенного
крепления
16
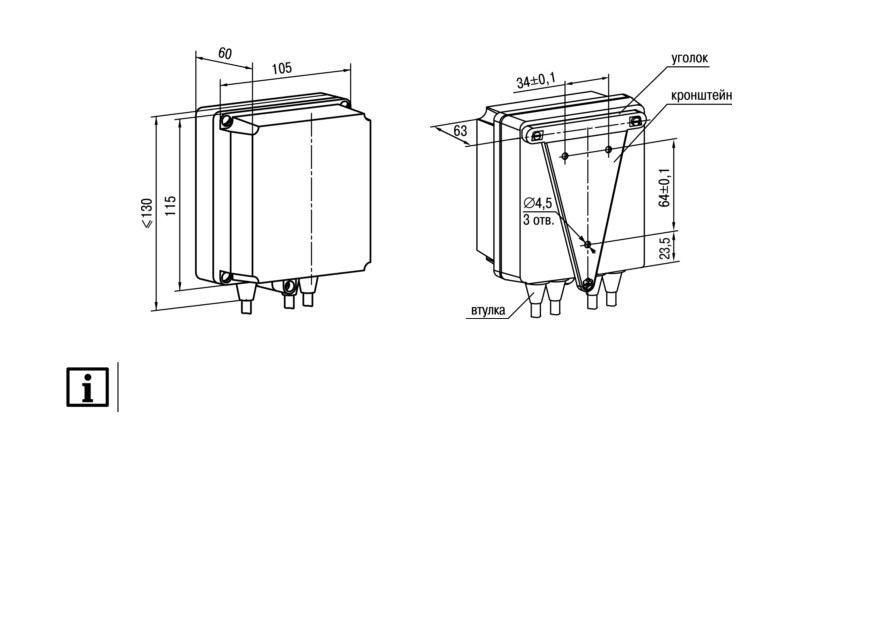
Рисунок 4.2 - Габаритные размеры корпуса Н
ПРИМЕЧАНИЕ
Втулки следует подрезать в соответствии с диаметром вводного кабеля.
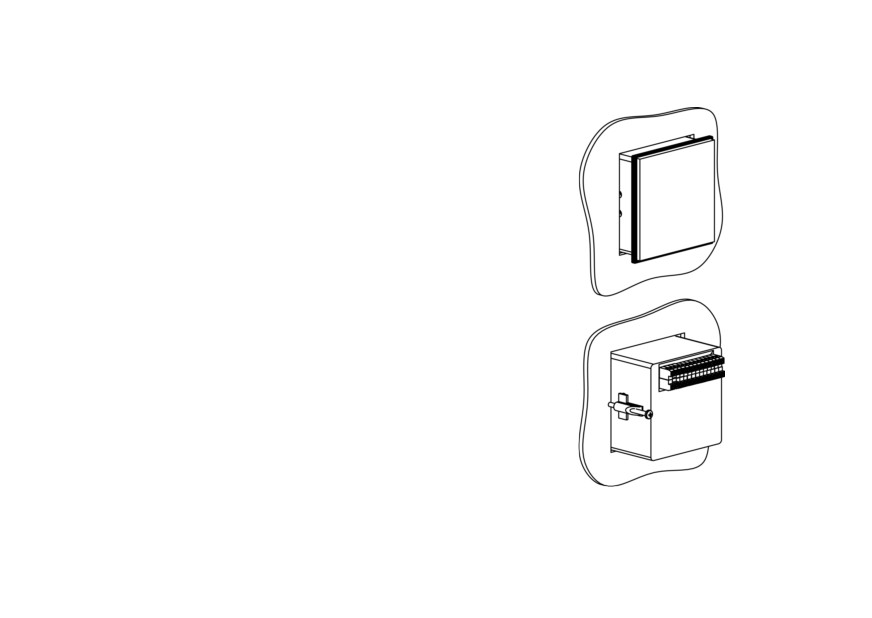
4.2 Установка прибора настенного крепления Н2
Для установки прибора следует:
1. Подготовить прибор к монтажу. Для этого следует снять фиксирующую планку (рисунок 4.3, 2, поз. 1) и
отсоединить электронный блок (там же, 2, поз. 2) от кронштейна (там же, 2, поз. 3).
17
2. Перед закреплением кронштейна на стене следует предварительно пропустить кабели внешних связей
через специальное отверстие для кабельного ввода (там же, 3, поз. 6). Закрепить кронштейн четырьмя
винтами на поверхности, предназначенной для установки прибора. На кронштейне имеется восемь
отверстий двух типов: для настенного крепления (там же, 3, поз. 4) и крепления на стандартный круглый
подрозетник с диаметром 60 мм (там же, 3, поз. 5 ).
ПРЕДУПРЕЖДЕНИЕ
Винты для крепления кронштейна не входят в комплект поставки.
3. Вставить электронный блок прибора в специальные пазы (там же, 3, поз. 7), расположенные на
кронштейне.
4. Смонтировать внешние связи с помощью разъемного соединителя (там же, 3, поз. 8), расположенного
на тыльной стороне электронного блока.
5. Защелкнуть электронный блок и кронштейн.
6. Надеть фиксирующую планку (там же, 4).
Демонтаж прибора следует производить в обратном порядке.
18

Рисунок 4.3 - Монтаж прибора настенного исполнения Н2
19

Рисунок 4.4 - Габаритные размеры корпуса Н2
20
4.3 Установка прибора щитового крепления Щ1
Для установки прибора следует:
1. Подготовить на щите управления место для установки
прибора (см. рисунок 4.6).
2. Установить прокладку на рамку прибора для
обеспечения степени защиты IP54.
3. Вставить прибор в специально подготовленное
отверстие на лицевой панели щита.
4. Вставить фиксаторы из комплекта поставки в
отверстия на боковых стенках прибора.
5. С усилием завернуть винты М4 × 35 из комплекта
поставки в отверстиях каждого фиксатора так, чтобы
прибор был плотно прижат к лицевой панели щита.
Демонтаж прибора следует производить в обратном
порядке.
Рисунок 4.5 - Монтаж прибора щитового
крепления
21
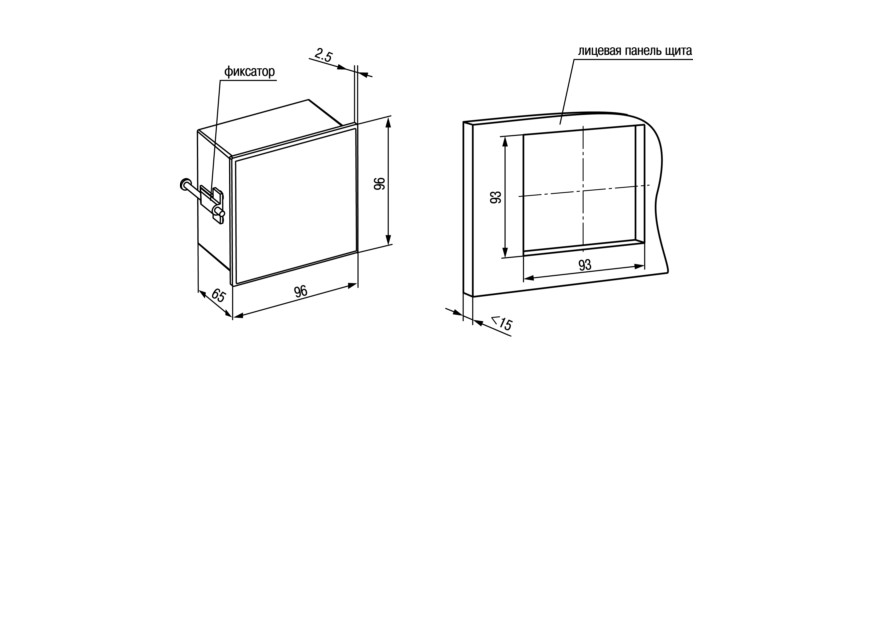
Рисунок 4.6 - Габаритные размеры корпуса Щ1
22

Рисунок 4.7 - Прибор в корпусе Щ1, установленный в щит толщиной 3 мм
23

4.4 Установка прибора щитового крепления Щ2
Для установки прибора следует:
1. Подготовить на щите управления место для установки
прибора (см. рисунок 4.9).
2. Установить прокладку на рамку прибора для
обеспечения степени защиты IP54.
3. Вставить прибор в специально подготовленное
отверстие на лицевой панели щита.
4. Вставить фиксаторы из комплекта поставки в
отверстия на боковых стенках прибора.
5. С усилием завернуть винты М4 × 35 из комплекта
поставки в отверстиях каждого фиксатора так, чтобы
прибор был плотно прижат к лицевой панели щита.
Демонтаж прибора следует производить в обратном
порядке.
Рисунок 4.8 - Монтаж прибора щитового
крепления
Рисунок 4.9 - Габаритные размеры корпуса Щ2
24
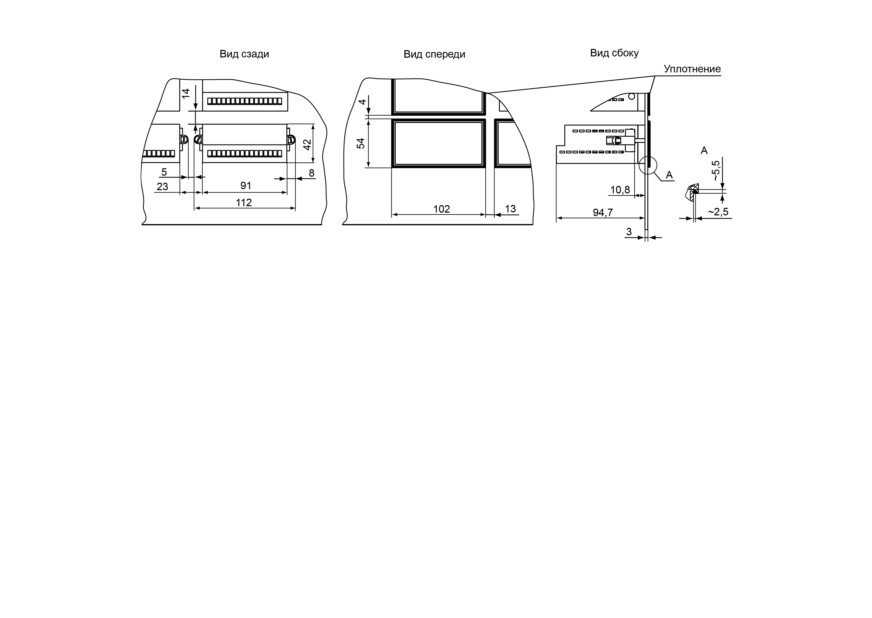
Рисунок 4.10 - Прибор в корпусе Щ2, установленный в щит толщиной 3 мм
5 Подключение
5.1 Рекомендации по подключению
Для обеспечения надежности электрических соединений рекомендуется использовать медные многожильные
кабели, концы которых перед подключением следует тщательно зачистить, залудить или использовать
кабельные наконечники. Требования к сечениям жил кабелей указаны на рисунке 5.1.
25

Рисунок 5.1 - Требования к сечениям жил кабелей
Общие требования к линиям соединений:
• во время прокладки кабелей следует выделить линии связи, соединяющие прибор с датчиком в
самостоятельную трассу (или несколько трасс), располагая ее (или их) отдельно от силовых кабелей, а
также от кабелей, создающих высокочастотные и импульсные помехи;
• для защиты входов прибора от влияния промышленных электромагнитных помех линии связи прибора с
датчиком следует экранировать. В качестве экранов могут быть использованы как специальные кабели с
экранирующими оплетками, так и заземленные стальные трубы подходящего диаметра. Экраны кабелей
с экранирующими оплетками следует подключить к контакту функционального заземления (FE) в щите
управления;
• следует устанавливать фильтры сетевых помех в линиях питания прибора;
• следует устанавливать искрогасящие фильтры в линиях коммутации силового оборудования.
26
Монтируя систему, в которой работает прибор, следует учитывать правила организации эффективного
заземления:
• все заземляющие линии прокладывать по схеме «звезда» с обеспечением хорошего контакта c
заземляемым элементом;
• все заземляющие цепи должны быть выполнены проводами наибольшего сечения;
• запрещается объединять клемму прибора с маркировкой «Общая» и заземляющие линии.
RS-485 обеспечивает создание сетей с количеством узлов (точек) до 256 и передачу данных на расстояние до
1200 м. В случае использования повторителей количество подключенных узлов и расстояние передачи может
быть увеличено. Для соединения приборов применяется экранированная витая пара проводов с сечением не
менее 0,2 мм2 и погонной емкостью не более 60 пФ/м.
5.2 Первое включение
ОПАСНОСТЬ
После распаковки прибора следует убедиться, что во время транспортировки прибор не был
поврежден.
Если прибор находился длительное время при температуре ниже минус 20 °С, то перед включением и началом
работ необходимо выдержать его в помещении с температурой, соответствующей рабочему диапазону, в
течение 30 минут.
Для подключения прибора следует:
1. Подключить прибор к источнику питания.
ВНИМАНИЕ
Перед подачей питания на прибор следует проверить правильность подключения напряжения
питания и его уровень.
2. Подключить линии связи «прибор - датчики» к первичным преобразователям и входам прибора.
27

3. Подать питание на прибор.
4. Настроить прибор.
5. Снять питание.
5.3 Назначение контактов клеммника
Рисунок 5.2 - Назначение контактов клеммника ТРМ212-Н, -Щ1 и -Щ2
Рисунок 5.3 - Назначение контактов клеммника ТРМ212-Н2
28
5.4 Подключение по интерфейсу RS-485
Интерфейс связи предназначен для включения прибора в сеть, организованную по стандарту RS-485.
Использование прибора в сети RS-485 позволяет:
• собирать данные об измеряемых величинах и ходе регулирования в системе диспетчеризации;
• установить параметры прибора и дистанционно управлять с помощью программы «Конфигуратор
ТРМ101 ТРМ2хх».
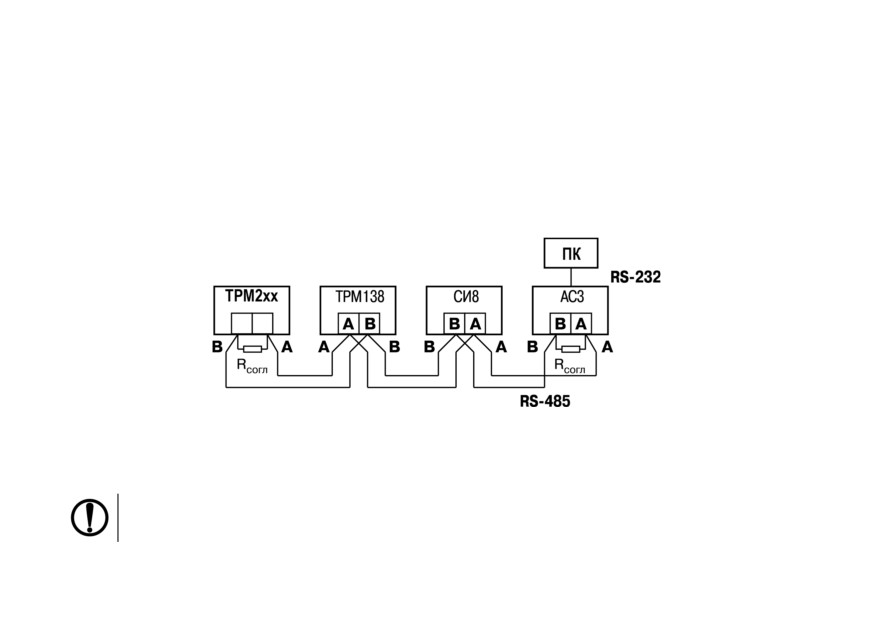
Все приборы в сети соединяются в последовательную шину, см. рисунок 5.4. Для качественной работы
приемопередатчиков и предотвращения влияния помех на концах линии связи должен быть согласующий
резистор с сопротивлением 120 Ом. Резистор следует подключать непосредственно к клеммам прибора.
Рисунок 5.4 - Подключение приборов по сети RS-485
Подключение прибора к ПК осуществляется через адаптер интерфейса RS-485↔RS-232, в качестве которого
может быть использован адаптер ОВЕН АС3, АС3-М или адаптер RS-485↔USB АС4.
ПРЕДУПРЕЖДЕНИЕ
Адаптер интерфейса ОВЕН содержит согласующий резистор сопротивлением Rсогл = 120 Ом.
29
Для работы по интерфейсу RS-485 следует выполнить соответствующие соединения и задать значения
параметров сети.
Для организации обмена данными в сети через интерфейс RS-485 необходим Мастер сети, основная функция
которого - инициировать обмен данными между отправителем и получателем. В качестве Мастера сети
следует использовать ПК с подключенным адаптером ОВЕН или приборы с функцией Мастера сети RS-485
(например, ПЛК и др.).
Прибор может работать в режиме Slave по протоколу обмена данными ОВЕН.
5.5 Подключение датчиков
5.5.1 Общие сведения
Входные измерительные устройства в приборе являются универсальными, т. е. к ним можно подключать
любые первичные преобразователи (датчики) из перечисленных в таблице 2.2. К входам прибора можно
подключить одновременно два датчика разных типов в любых сочетаниях.
ВНИМАНИЕ
Для защиты входных цепей прибора от возможного пробоя зарядами статического электричества,
накопленного на линиях связи «прибор - датчик», перед подключением к клеммнику прибора их жилы
следует на 1-2 секунды соединить с винтом функционального заземления (FE) щита.
Во время проверки исправности датчика и линии связи следует отключить прибор от сети питания. Для
избежания выхода прибора из строя при «прозвонке» связей следует использовать измерительные устройства
с напряжением питания не более 4,5 В. При более высоких напряжениях питания этих устройств отключение
датчика от прибора обязательно.
Параметры линии соединения прибора с датчиком приведены в таблице 5.1.
30
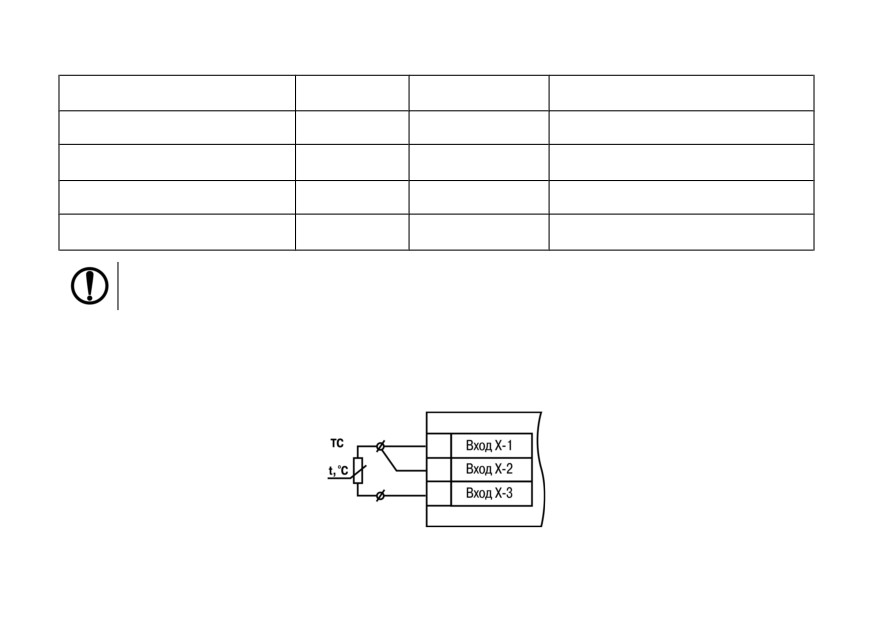
Таблица 5.1 - Параметры линии связи прибора с датчиками
Длина линий, м,
Сопротивление
Тип датчика
Исполнение линии
не более
линии, Ом, не более
Трехпроводная, провода равной длины и
ТС
100
15
сечения
Термоэлектродный кабель
ТП
20
100
(компенсационный)
Унифицированный сигнал
100
100
Двухпроводная
постоянного тока
Унифицированный сигнал
100
5
Двухпроводная
напряжения постоянного тока
ПРЕДУПРЕЖДЕНИЕ
На схемах подключения вместо номера входа (выхода) указан X (например, Х-1).
Цифровые входы прибора разделены на группы по четыре входа, гальванически изолированные от других
цепей. Каждая группа входов имеет свою общую клемму питания. Дискретные датчики следует подключать к
входам только относительно клеммы питания входов для данной группы.
5.5.2 Подключение ТС по трехпроводной схеме
Рисунок 5.5 - Трехпроводная схема подключения ТС
31

В приборе используется трехпроводная схема подключения ТС.
Допускается соединение ТС с прибором по двухпроводной линии только с обязательным выполнением
определенных условий (см. раздел ниже).
5.5.3 Подключение ТС по двухпроводной схеме
Соединять ТС с прибором по двухпроводной схеме следует в случае невозможности использования
трехпроводной схемы. Например, в случае установки прибора на объектах, оборудованных ранее
проложенными двухпроводными монтажными трассами.
Для компенсации паразитного сопротивления проводов
следует:
1. Перед началом работы установить перемычки между
контактами Вход Х-1 и Вход Х-2 клеммника прибора,
а двухпроводную линию подключить, соответственно,
к контактам Вход Х-2 и Вход Х-3.
2. Подключить к противоположным от прибора концам
линии связи «термометр-прибор» вместо ТС магазин
Рисунок 5.6 - Двухпроводная схема
сопротивлений с классом точности не более 0,05
подключения ТС
(например, Р4831).
3. Установить на магазине сопротивлений значение,
равное сопротивлению ТС при температуре 0 °С (в зависимости от типа датчика).
4. Подать питание на прибор.
5. Через 15-20 секунд по показаниям цифрового индикатора определить величину отклонения
температуры от 0 °С.
6. Ввести в память прибора значение коррекции сдвиг характеристики SH1 (SH2), равное по величине
показаниям прибора и взятое с противоположным знаком.
7. Перевести прибор в режим измерения температуры и убедиться, что его показания равны 0,0 ± 0,2 °С,
чтобы проверить правильность задания коррекции.
32
8. Отключить питание прибора, отсоединить линию связи от магазина сопротивлений и подключить ее к
ТС.
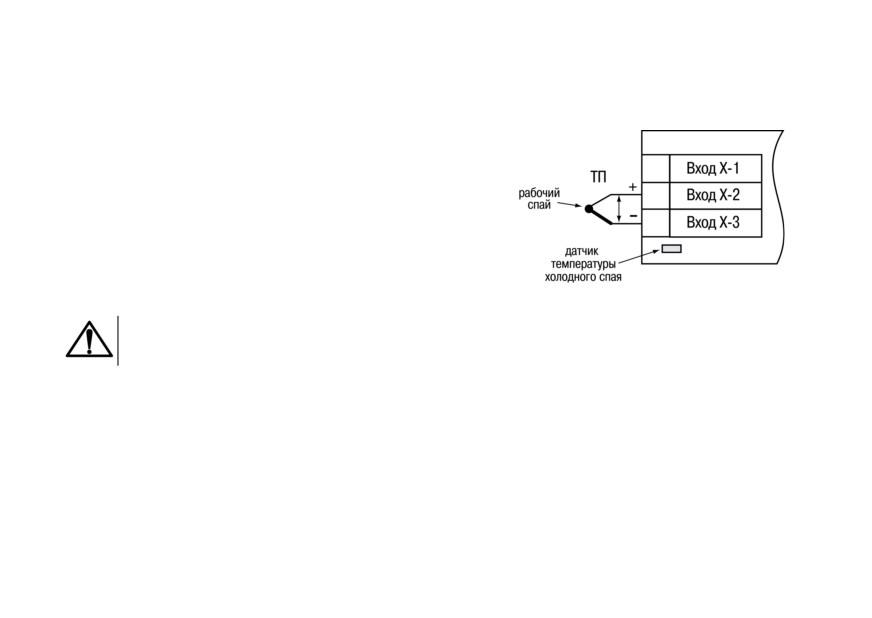
5.5.4 Подключение ТП
ТП к прибору следует подключать с помощью специальных
компенсационных
(термоэлектродных)
проводов,
изготовленных из тех же самых материалов, что и ТП.
Допускается использовать провода из металлов с
термоэлектрическими характеристиками, которые в
диапазоне температур от
0
до
100
° С аналогичны
характеристикам материалов электродов ТП. Соединяя
компенсационные провода с ТП и прибором следует
соблюдать полярность. В случае нарушений указанных
условий могут возникать значительные погрешности при
измерении.
Рисунок 5.7 - Схема подключения
термопары
ВНИМАНИЕ
Рабочий спай ТП должен быть электрически
изолирован от внешнего оборудования!
В приборе предусмотрена схема автоматической компенсации температуры свободных концов ТП. Датчик
температуры «холодного спая» установлен рядом с клеммником прибора.
5.5.5 Подключение датчиков c унифицированным выходным сигналом тока или
напряжения
Подключать датчики можно непосредственно к входным контактам прибора.
33

Рисунок 5.8 - Подключение датчиков с выходом в виде тока или напряжения
ВНИМАНИЕ
Подключать датчики с выходом в виде тока (0...5,0 мА, 0...20,0 мА или 4,0…20,0 мА) следует только
после установки шунтирующего резистора с сопротивлением 100 Ом (допуск не более 0,1 %),
который следует подсоединять в соответствии с рисунком 5.10. Вывод резистора должен заводиться
с той же стороны винтовой клеммы, что и провод от датчика. В случае использования провода с
сечением более 0,35 мм, конец провода и вывод резистора следует скрутить или спаять.
Невыполнение этого требования может привести к пропаданию контакта между выводом
резистора и клеммы, что повлечет повреждение входа прибора!
Рисунок 5.9 - Схема подключения активного датчика Рисунок 5.10 - Схема подключения пассивного датчика с
с выходом в виде напряжения -50…50 мВ или 0...1 В токовым выходом 0...5 мА или 0(4)...20 мА Rш = 100 ± 0,1
Ом
34

5.5.6 Подключение датчика положения
Датчик положения предназначен для определения степени
открытия запорно-регулирующего клапана, задвижки,
шабера и т. п. при регулировании технологических
параметров.
Прибор обрабатывает сигналы:
• датчиков положения резистивного типа с
сопротивлением до 2 кОм;
• датчиков с токовым выходом 0...5 мА, 0...20 мА и
Рисунок 5.11 - Подключение датчика
4...20 мА.
положения резистивного типа
Датчик положения с токовым выходом подключается к
прибору аналогично датчику с унифицированным выходным сигналом тока.
ВНИМАНИЕ
В случае использования датчиков положения любого типа должна быть проведена совместная
юстировка системы «датчик-прибор».
5.6 Подключение нагрузки к ВУ
Цепи дискретных и аналоговых выходных элементов гальванически изолированы от схемы прибора.
Исключение составляет выход Т для управления внешним твердотельным реле, где гальваническую изоляцию
обеспечивает само реле.
35
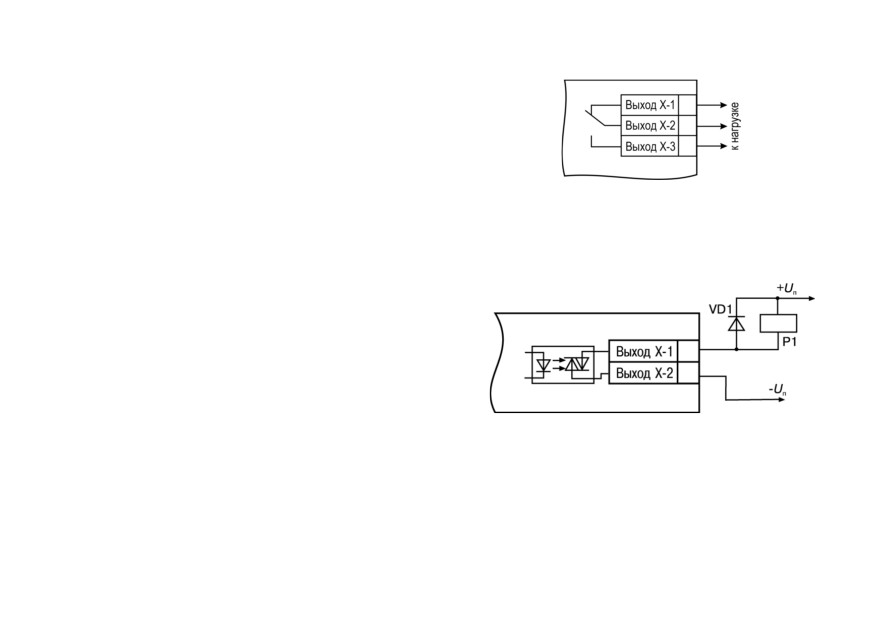
5.6.1 Подключение нагрузки к ВУ типа Р
Схема подключения нагрузки к ВУ типа Р приведена на
рисунке 5.12.
Рисунок 5.12 - Схема подключения нагрузки
к ВУ типа Р
5.6.2 Подключение нагрузки к ВУ типа К
Транзисторная оптопара применяется, как правило, для
управления низковольтным электромагнитным или
твердотельным реле (до 50 В постоянного тока). Чтобы
транзистор не вышел из строя из-за большого тока
самоиндукции, следует установить диод VD1 параллельно
обмотке внешнего реле Р1.
Рисунок 5.13 - Схема подключения нагрузки
к ВУ1 типа К
36
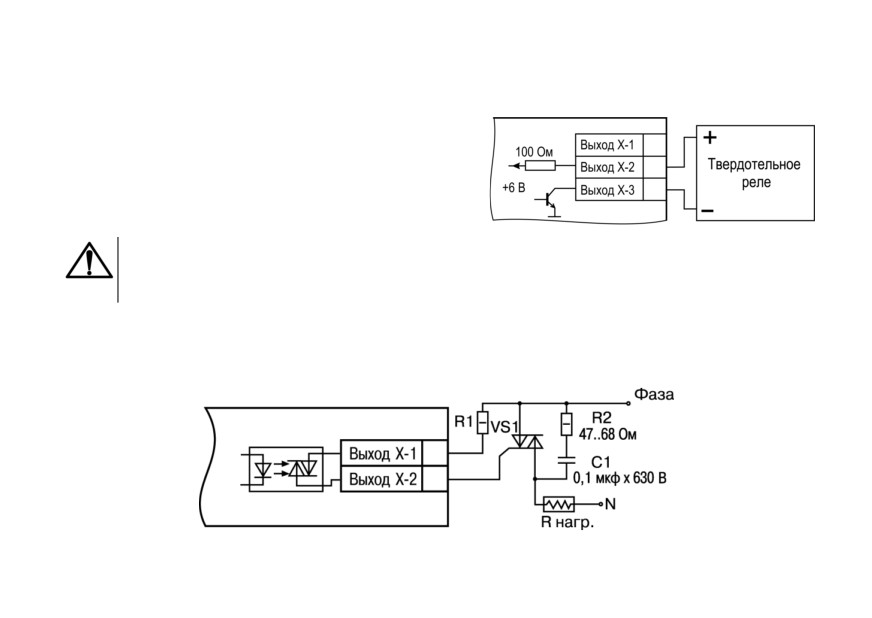
5.6.3 Подключение нагрузки к ВУ типа Т
Выход «Т» используется для подключения твердотельных реле, рассчитанных на управление постоянным
напряжением 4...6 В с током управления не более 100 мА.
Внутри
выходного
элемента
устанавливается
ограничительный резистор Rогр номиналом 100 Ом.
Выход выполнен на основе транзисторного ключа n-p-n-типа
и имеет два состояния:
• 0...1 В — низкий логический уровень;
• 4...6 В — высокий логический уровень.
ВНИМАНИЕ
Рисунок 5.14 - Схема подключения нагрузки
Длина соединительного кабеля между прибором с
к ВУ типа Т
выходом Т и твердотельным реле не должна
превышать 3 м.
5.6.4 Подключение нагрузки к ВУ типа С
Оптосимистор включается в цепь управления силового симистора через ограничивающий резистор R1.
Значение сопротивления резистора определяет величина тока управления симистора.
Рисунок 5.15 - Схема подключения силового симистора к ВУ типа С
37

Оптосимистор может также управлять парой встречно-параллельно включенных тиристоров VS1 и VS2. Для
предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам
рекомендуется подключать фильтрующую RC-цепочку (R2C1).
Рисунок 5.16 - Схема встречно-параллельного подключения двух тиристоров к ВУ типа С
5.6.5 Подключение нагрузки к ВУ типа С3
Три оптосимистора по рабочим параметрам аналогичны выходу С и предназначены для управления
трехфазной нагрузкой.
38
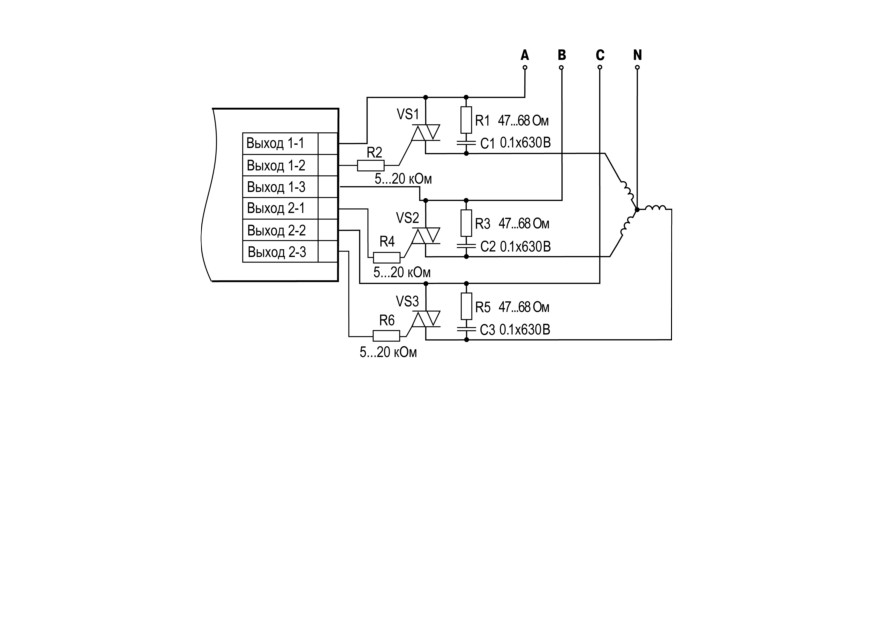
Рисунок 5.17 - Схема подключения силового симистора к ВУ типа С3
39

5.6.6 Подключение нагрузки к ВУ типа И
Для работы ЦАП «параметр — ток 4…20 мА» используется внешний источник питания постоянного тока.
Номинальное значение напряжения рассчитывается
следующим образом:
Uп. min
= 10 В + 0,02 А ∙ Rн - минимальное допустимое
напряжение источника питания, В,
Uп. max
= Uп. min
+
2,5
В - максимальное допустимое
напряжение источника питания, В,
Рисунок 5.18 - Подключение к ВУ типа И
где Rн - сопротивление нагрузки ЦАП, Ом.
ВНИМАНИЕ
Внешний источник питания и прибор рекомендуется подключать к одной питающей сети.
Если по какой-либо причине напряжение источника питания
ЦАП превышает расчетное значение Uп. max, то
последовательно с нагрузкой необходимо включить
ограничительный резистор Rогр.
Сопротивление Rогр рассчитывается по формулам:
Рисунок 5.19 - Подключение к ВУ типа И с
ограничивающим резистором
(5.1)
(5.2)
40

(5.3)
где Rогр - номинальное значение ограничительного резистора, кОм;
Rогр.min - минимально допустимое значение ограничительного резистора, кОм;
Rогр.max - максимально допустимое значение ограничительного резистора, кОм;
Iцап.max - максимальный выходной ток ЦАП, мА.
ВНИМАНИЕ
Напряжение источника питания ЦАП не должно превышать 36 В.
5.6.7 Подключение нагрузки к ВУ типа У
Для работы с нагрузкой ВУ типа У следует подключить к
внешнему источнику питания постоянного тока с
напряжением Uп в диапазоне от 15 до 32 В.
Сопротивление нагрузки RН, подключаемой к ЦАП, должно
быть не менее 2 кОм.
ВНИМАНИЕ
Напряжение источника питания ЦАП не должно
превышать 36 В.
Рисунок 5.20 - Схема подключения нагрузки
к ВУ типа У
41

6 Эксплуатация
6.1 Принцип работы
Функциональная схема прибора приведена на рисунке 6.1.
Рисунок 6.1 - Функциональная схема прибора
42

Прибор имеет два универсальных входа. В процессе работы прибор опрашивает датчики, вычисляет по
полученным данным текущие значения измеряемых величин, отображает их на цифровом индикаторе и
выдает соответствующие сигналы на выходные устройства.
6.2 Управление и индикация
На лицевой панели прибора расположены элементы индикации и управления:
• два четырехразрядных семисегментных ЦИ;
• восемь светодиодов;
• кнопки.
Рисунок 6.2 - Лицевая панель прибора для корпусов: 1) настенного Н и щитового Щ1 крепления, 2)
щитового Щ2, 3) настенного Н2
43

Таблица 6.1 - Назначение ЦИ
Отображаемая информация
Режим эксплуатации прибора
Верхний индикатор
Нижний индикатор
Работа
Текущее значение измеряемой величины
Значение уставки
Настройка
Название параметра настройки
Значение параметра настройки
Меню
Надпись «MENU»
Название группы параметров
Авария
Обозначение ошибки
Обозначение ошибки
Таблица 6.2 - Назначение светодиодов
Светодиод
Состояние
Значение
К1
Светится
ВУ1 в состоянии ВКЛЮЧЕНО (только для ВУ дискретного типа)
К2
Светится
ВУ2 в состоянии ВКЛЮЧЕНО (только для ВУ дискретного типа)
УСТ
Светится
Уставка редактируется
LBA
Мигает
Обнаружен обрыв в цепи регулирования
СТОП
Светится
Регулятор остановлен
Мигает
Остановка регулятора произошла из-за аварии LBA или аппаратной
ошибки
АН
Светится
Выполнение автонастройки, светодиод отключается при удачном
завершении
Мигает
Автонастройка закончена неудачно
RS
Включается на 1 с
Передача данных компьютеру по RS-485
РУЧ
Светится
Режим ручного управления выходным сигналом ПИД-регулятора
44

Таблица 6.3 - Назначение кнопок
Режим эксплуатации
Кнопка
Назначение
прибора
Работа
Краткое нажатие:
• переключение между 1 и 2 каналом для отображения
измеренного значения и значения уставки ЛУ;
нажатие > 3 с:
• вход в меню.
Меню
Переход к настройке первого параметра группы. Если отображается
для Н2:
группа LVOP (LVOP), то происходит выход из меню.
Настройка
Краткое нажатие:
• переход к следующему параметру группы
нажатие > 3 с:
• выход в меню к названию группы.
Работа
Увеличение/уменьшение значения уставки на нижнем индикаторе
Меню
Выбор группы параметров
для Н2:
Настройка
Увеличение/уменьшение значения параметра (для изменения с
ускорением зажать кнопку)
Увеличение/уменьшение яркости свечения индикаторов
Для Н2:
Комбинации кнопок для входа в специальные режимы
Переход к установке кода доступа
+
+
Для Н2:
+
+
45
6.3 Включение и работа
Визуальный контроль над работой выходного устройства следует осуществлять по светодиодам К1 и К2,
расположенным на передней панели прибора. В зависимости от типа выходных устройств светодиоды
работают по-разному.
Для приборов с ВУ1 и ВУ2 дискретного типа светодиод сигнализирует о состоянии соответствующего ВУ:
светится - «включено», не светится - «выключено».
Для приборов с ВУ1 аналогового типа и ВУ2 дискретного типа свечение светодиода К2 сигнализирует о
срабатывании устройства компаратора, а длительность свечения светодиода К1
зависит от мощности
выходного сигнала. При минимальном выходном сигнале
4
мА (0 В) светодиод К1 не светится, при
дальнейшем увеличении мощности сигнала светодиод начинает мигать с частотой один раз в секунду, при
сигнале 20 мА (10 В) - светится непрерывно.
В дальнейшем можно изменить режим работы прибора (см. раздел 6.4).
Во время работы прибор проверяет исправность подключенных датчиков. Аварийными ситуациями по входу
считаются следующие:
• выход из строя датчика (обрыв или короткое замыкание ТС, обрыв ТП или унифицированного датчика);
• выход измеряемой величины за диапазон измерения (см. таблицу 2.2);
При возникновении аварии по входу прибор переходит в следующее состояние:
• мигает светодиод канала, на котором обнаружена авария;
• на цифровой индикатор выводится сообщение аварийной ситуации (см. Приложение
Возможные неисправности и способы их устранения ).
• ВУ переводится в безопасное состояние (см. раздел 7.4.2.6).
46

ПРЕДУПРЕЖДЕНИЕ
Прибор индицирует:
• температуру «холодного спая» - в случае короткого замыкания ТП;
• значение нижнего предела диапазона - в случае короткого замыкания датчиков 0...1 В,
замыкания шунта 0...5 мА, 0...20 мА или обрыва датчиков 0...5 мА, 0...20 мА;
• значение середины диапазона - в случае короткого замыкания датчика - 50 ... + 50 мВ.
6.4 Регулирование
Прибор осуществляет регулирование в режимах:
• автоматический;
• ручной;
• дистанционный.
6.4.1 Режим автоматического управления регулятором
В автоматическом режиме выходной сигнал управления рассчитывается самим прибором.
Для начала регулирования следует:
• задать настройки прибора,
• выставить значение уставки,
• запустить регулятор.
Для задания уставки (параметр SP) следует:
1. Нажать и удерживать кнопку
до появления на верхнем цифровом индикаторе надписи MENu.
2. Выбрать кнопками
и
меню LVOP и нажать кнопку
47
3. Повторным нажатием
перейти к редактированию уставки (светится светодиод УСТ).
4. Кнопками
и
установить нужное значение уставки на нижнем цифровом индикаторе, нажать
ПРЕДУПРЕЖДЕНИЕ
1. Если выбран режим индикации по умолчанию (режим 1), то уставку можно изменять кнопками
или
без перехода в меню. Для записи значения в память прибора следует нажать
2. Режим редактирования уставки доступен при значениях On параметров diS1 или diS3 группы
DISP.
Запуск и остановку процесса регулирования можно произвести двумя способами:
• изменением значения параметра r-S: RUN - регулятор работает, STOP - регулятор остановлен, светится
светодиод СТОП;
• изменением состояния ключа на дополнительном входе, если задействована соответствующая функция
дополнительного входа.
ПРЕДУПРЕЖДЕНИЕ
Команды от дополнительного входа имеют приоритет над управлением кнопками. Например, процесс
регулирования путем установки значения rUn в параметре r-S не может быть запущен, если ключ
разомкнут.
48
6.4.2 Режим дистанционного управления регулятором
При дистанционном управлении регулятором требуемый выходной сигнал регулятора следует задавать
вручную с помощью компьютера через интерфейс RS-485.
Управление производится с помощью двух оперативных параметров:
• r-L - перевод прибора на внешнее управление, допустимые значения:
- 0 - автоматический режим управления регулятором;
- 1 - дистанционный режим (управление с помощью ПК).
• r.OUt - выходной сигнал регулятора, допустимые значения:
- -1.000…+1.000 для прибора с ВУ дискретного типа;
- 0.000...1.000 для прибора с ВУ аналогового типа.
Во время записи r-L = 1 засвечивается светодиод RS. Прибор прекращает регулирование и переходит в ручное
управление. Нужное положение задвижки следует задавать в параметре r.OUt по RS-485.
Для прибора с ВУ дискретного типа в параметре r. OUt задают количество процентов, на которое нужно
переместить задвижку.
ВНИМАНИЕ
Не путать с положением, в которое требуется установить задвижку.
При записи:
• r.OUt = -1 - прибору посылается команда на полное закрытие задвижки;
• - 1 < r.OUt < 0 - задвижка закрывается на (r.OUt ∙ 100 %);
• r.OUt = 0 - положение задвижки не изменяется;
• 0 < r.OUt < 1 - задвижка открывается на (r.OUt ∙ 100 %);
• r.OUt = 1 - прибору посылается команда на полное открытие задвижки.
49
Для прибора с ВУ аналогового типа в параметре r. OUt задают (в относительных единицах) положение, в
которое требуется установить задвижку:
• r.OUt = 0.000 - полностью закрыта;
• r.OUt = 1.000 - полностью открыта.
Во время записи r-L =
0
светодиод RS гаснет, управление возвращается прибору. Прибор начинает
регулирование в автоматическом режиме по заданным настройкам.
ПРЕДУПРЕЖДЕНИЕ
1. Параметры r-L и r.OUt доступны только через интерфейс RS-485.
2. Во время каждого включения прибора или его перезапуске по сети параметр r-L принимает
значение 0.
3. Для прибора с ВУ дискретного типа каждый раз перед записью значения в r.OUt необходимо
считывать его текущее значение. Если оно не равно 0, то запись нового значения параметра
не рекомендуется, поскольку это может привести к потере контроля над реальным
положением задвижки.
6.4.3 Режим ручного управления регулятором
В режиме ручного управления следует устанавливать задвижку в нужное положение с помощью кнопок на
лицевой панели прибора.
Блокируется:
• регулирование в автоматическом режиме, в том числе запуск/остановка через ключ;
• команды дистанционного управления по RS-485.
Для входа в режим ручного управления следует:
• войти в меню прибора,
• нажать и удерживать кнопки
+
50

При входе в режим ручного управления засвечивается светодиод РУЧ. Задвижка остается в том положении, в
каком она была на момент входа в режим.
Для прибора с дискретными выходами на индикаторах отображаются следующие значения:
• с датчиком положения:
- на верхнем цифровом индикаторе - значение, измеренное на Входе 1 (PV1);
- на нижнем цифровом индикаторе - значение с датчика положения (PV2).
• без датчика положения:
- на верхнем цифровом индикаторе:
◦ значение, измеренное на Входе 1 (PV1);
◦ значение с вычислителя (LUPV), если inP2 = in.t2 и CALC ≠GrAF.
- нижний цифровой индикатор не задействован.
Изменение положения задвижки производится с помощью кнопок:
— сигнал на открытие задвижки;
— сигнал на закрытие задвижки.
Для прибора с аналоговым ВУ на цифровых индикаторах отображаются следующие значения:
• на верхнем цифровом индикаторе:
- значение, измеренное на Входе 1 (PV1);
- значение с вычислителя (LUPV), если inP2 = in.t2 и CALC ≠ GrAF.
• на нижнем цифровом индикаторе - положение задвижки.
51
Для прибора с аналоговым ВУ кнопками
и
следует устанавливать на нижнем цифровом индикаторе
значение, характеризующее положение задвижки, в диапазоне от
0 до 100 %. На нижнем цифровом
индикаторе также будет отображаться рассчитанное прибором текущее положение задвижки. Текущее
положение может отличаться от установленного, поскольку задвижка не может мгновенно принимать заданное
положение.
Кнопками
и
можно задать новое положение задвижки до того, как она перейдет в заданное ранее
положение.
Выход из режима ручного управления осуществляется длительным нажатием кнопки
. Светодиод РУЧ
гаснет.
Прибор начинает работать в автоматическом или дистанционном режиме (в зависимости от значения
параметра r-L) в соответствии с заданными установками.
7 Настройка
7.1 Последовательность настройки
Настройка прибора предназначена для задания и записи настраиваемых параметров в энергонезависимую
память прибора.
Для доступа к параметрам настройки следует нажать и удерживать кнопку
в течение 3 секунд.
Если в течение 20 секунд во время настройки не производится операций с кнопками, прибор автоматически
возвращается к работе.
Основные параметры прибора объединены в меню, которое состоит из следующих групп:
• LVOP - уставки логических устройств, управление запуском регулирования и включением автонастройки;
52
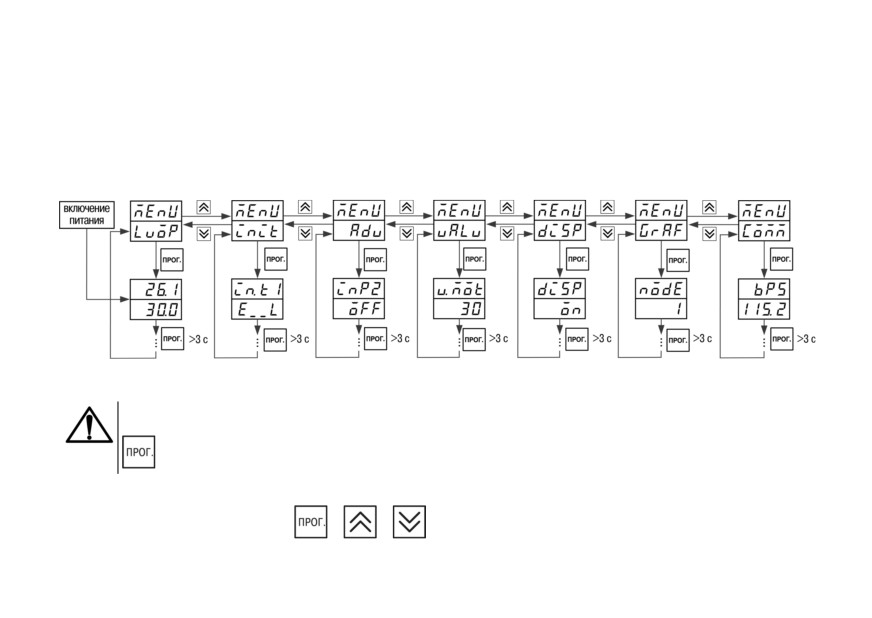
• AdV - дополнительные настройки регулятора;
• init - параметры настройки входов прибора (устанавливаются, как правило, один раз при монтаже
системы);
• VaLV - параметры задвижки;
• DISP - параметры управления индикацией;
• GrAF - параметры для задания графика коррекции уставки;
• COMM - настройка интерфейса RS-485.
Рисунок 7.1 - Навигация в меню настройки
ВНИМАНИЕ
Новое значение параметра записывается в память только после кратковременного нажатия кнопки
, т. е. во время перехода к следующему параметру.
В приборе существует группа служебных параметров. Для перехода в группу следует выполнить действия:
1. Нажать комбинацию кнопок
+
+
и удерживать не менее 3 секунд.
53
2. После того, как на цифровом индикаторе высветится сообщение
, с помощью кнопок
ввести код 100 и нажать
Первую настройку прибора следует осуществлять строго в приведенной ниже последовательности.
7.2 Установка параметров входа
Настройки параметров для Входа 1 и Входа 2 (если он настроен как измерительный вход) производятся в меню
Init.
Функция для Входа 2 задается в меню ADV.
7.2.1 Код типа датчика
Код типа датчика настраивается в параметрах in. t1 и in. t2 для 1 и 2 входов соответственно (если вход 2
настроен как измерительный). Перечень кодов приведен в Приложении Настраиваемые параметры .
ПРЕДУПРЕЖДЕНИЕ
Если Вход 2 используется как измерительный (inP2 = in.t2), типы датчиков в параметрах in.t1 и in.t2
должны быть установлены так, чтобы прибор измерял одинаковые физические величины по обоим
входам, например, к Входу 1 подключена ТП, а к Входу 2 - ТС.
7.2.2 Установка точности вывода температуры
В случае использования ТС и ТП можно установить желаемую точность отображения измеренной температуры
на цифровом индикаторе. Для этого следует задать параметр dPT1 (dPT2).
54

ПРЕДУПРЕЖДЕНИЕ
В случае использования датчиков с унифицированным сигналом этот параметр для настройки
недоступен.
В случае работы с температурами выше 1000 °С рекомендуется устанавливать значение параметра, равное 0,
с температурами ниже 1000 °С - равное 1 (отображение значения температуры на индикаторе с точностью до
0,1 °С).
ПРЕДУПРЕЖДЕНИЕ
В случае использования датчиков с унифицированным сигналом эти параметры для настройки
недоступны.
7.2.3 Установка диапазона измерения
В случае использования датчиков с унифицированным выходным сигналом тока или напряжения следует
провести настройку диапазона измерения, задав значения параметров:
• dP 1 и dP 2 - положение десятичной точки;
• in.L1 и in.L2 - нижняя граница диапазона измерения;
• in.H 1 и in.H 2 - верхняя граница диапазона измерения.
Диапазон измерения задается в соответствии с диапазоном работы применяемого датчика.
Прибор осуществляет линейное преобразование входной величины в реальную физическую величину в
соответствии с заданным диапазоном измерения по формуле:
(7.1)
при любых соотношениях ПВ и ПН,
где IX - значение сигнала с датчика в относительных единицах диапазона 0...1,000;
ПН - заданное пользователем значение нижней границы диапазона измерения ( in.L1 и in.L2 );
ПВ - заданное пользователем значение верхней границы диапазона измерения ( in.H1 и in.H2 ).
55
Параметр «нижняя граница диапазона измерения» определяет, какое значение измеряемой величины будет
выводиться на цифровом индикаторе при минимальном уровне сигнала с датчика (например, 4 мА для датчика
с выходным сигналом тока 4...20 мА).
Параметр «верхняя граница диапазона измерения» определяет, какое значение измеряемой величины будет
выводиться на цифровом индикаторе при максимальном уровне сигнала с датчика (например, 20 мА для
датчика с выходным сигналом тока 4...20 мА или 1 В для датчика с выходным сигналом напряжения 0...1 В).
Параметр «положение десятичной точки» определяет количество знаков после запятой, которое будет
выводиться на цифровом индикаторе. Значение параметра влияет на отображение измеренной величины и
остальных параметров, имеющих те же единицы измерения.
ПРЕДУПРЕЖДЕНИЕ
Для получения более высокой разрешающей способности следует устанавливать большее значение
dP1 (dP2). Например, при использовании датчика давления с диапазоном 0-15 атмосфер и выходным
сигналом тока от 0 до 20 мА наилучшие результаты могут быть получены со следующими значениями
параметров: in-L1 (in-L2) = 0,00 и in-H1 (in-H2) = 15,00 при dP1 (dP2) = 2.
ВНИМАНИЕ
1. Для датчиков ТС и ТП параметр dP по умолчанию равен 1 и не изменяется.
2. За каждым типом датчика в памяти прибора сохраняется определенное значение параметра
dP. Поэтому, например, при замене датчика (изменении параметра «тип датчика») с
унифицированным сигналом с установленным значением dP = 0 на датчик ТС (у которого по
умолчанию dP = 1) значение dP автоматически изменится. Также изменятся значения уставки и
других параметров, зависящих от dP, т. е. в нашем примере: при dP = 0 уставка равна,
например, 1000, то при dP = 1 она станет 100,0.
7.2.4 Вычисление квадратного корня
Для включения вычисления квадратного корня следует установить значение ON в параметр SQR1 (SQR2).
Для работы с датчиками, унифицированный выходной сигнал которых пропорционален квадрату измеряемой
величины, используется функция вычисления квадратного корня, которая включается программным путем.
56

Вычисление квадратного корня с учетом настроек масштабирования происходит по следующей формуле:
(7.2)
где X - значение сигнала с датчика в относительных единицах диапазона от 0 до 1,000;
ПН - заданное значение нижней границы диапазона измерения (in.L1, in.L2);
ПВ - заданное значение верхней границы диапазона измерения (in.H1, in.H2).
ВНИМАНИЕ
Данная функция и вычислитель независимы друг от друга. Поэтому, если, например, установлено
SQr1 (SQr2) = On, вычислитель в качестве PV1 (PV2) будет использовать значение, вычисленное по
приведенной выше формуле.
7.2.5 Коррекция измерительной характеристики датчика
Измеренное прибором значение следует откорректировать для устранения начальной погрешности
преобразования входных сигналов и погрешностей, вносимых соединительными проводами. В приборе есть
два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
57

ВНИМАНИЕ
В случае подключения ТС по двухпроводной схеме следует выполнять коррекцию сдвиг
характеристики в обязательном порядке. Определение значения параметра сдвиг характеристики
производится по методике, приведенной в разделе 5.5.3.
Сдвиг характеристики применяется:
• для компенсации погрешностей, вносимых
сопротивлением подводящих проводов в случае
использования двухпроводной схемы подключения
ТС;
• в случае отклонения у ТС значения R0.
Такая коррекция осуществляется путем прибавления к
измеренной величине значения δ.
Значение δ задается параметром SH.
Пример сдвига характеристики для датчика TCM (Cu50)
графически представлен на рисунке 7.2.
Параметр SH допускается изменять в диапазоне от минус
50,0 до +50,0 ° С для температурных датчиков (ТС и ТП), от
Рисунок 7.2 - Коррекция «сдвиг
характеристики»
58
минус 500 до +500 °С — для датчиков с унифицированным сигналом тока или напряжения.
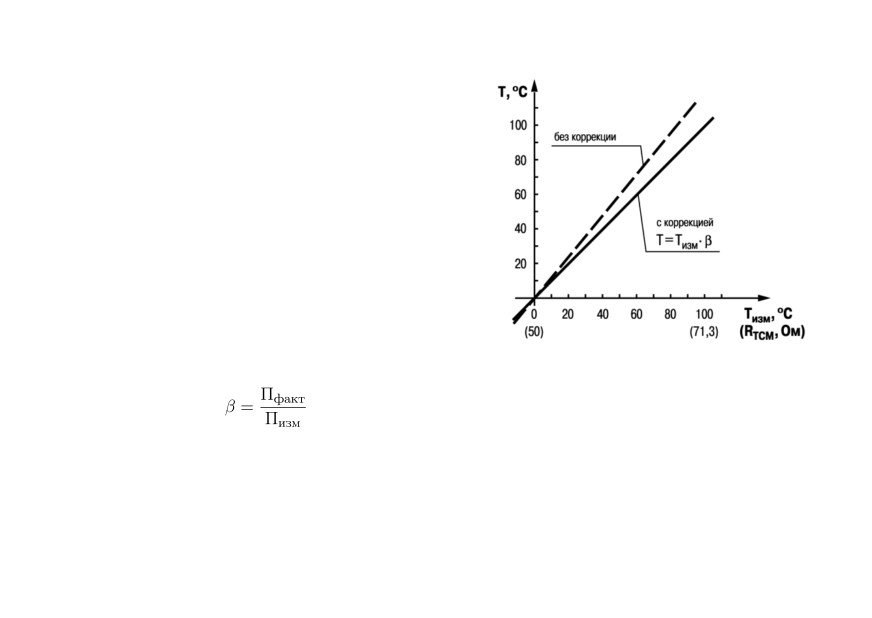
Изменение наклона характеристики осуществляется путем
умножения измеренной (и скорректированной «сдвигом»,
если эта коррекция необходима) величины на поправочный
коэффициент β. Значение β задается параметром KU.
Пример изменения наклона измерительной характеристики
графически представлен на рисунке 7.3.
Данный вид коррекции используется, как правило, для
компенсации погрешностей самих датчиков (например, в
случае отклонения у ТС параметра α от стандартного
значения) или погрешностей, связанных с разбросом
сопротивлений шунтирующих резисторов
(при работе с
преобразователями, выходным сигналом которых является
ток).
Значение поправочного коэффициента β задается в
безразмерных единицах в диапазоне от 0,500 до 2,000 и
перед установкой определяется по формуле:
Рисунок 7.3 - Коррекция «наклон
характеристики»
(7.3)
где Пфакт - фактическое значение контролируемой входной величины;
Пизм - измеренное прибором значение той же величины.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое
к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.
59
7.2.6 Установка параметров цифрового фильтра
Для ослабления влияния помех на эксплуатационные характеристики прибора в составе его каналов
измерения предусмотрены цифровые фильтры.
Фильтрация настраивается с помощью параметров:
• Fb — полоса цифрового фильтра;
• inF — постоянная времени цифрового фильтра.
ПРЕДУПРЕЖДЕНИЕ
1. Значение inF допускается устанавливать в диапазоне от 1 до 999 секунд, при inF = OFF
фильтрация методом экспоненциального сглаживания отсутствует.
2. Значение полосы фильтра устанавливается в диапазоне от 0 до 9999 °С/с. При Fb= 0
«фильтрация единичных помех» отсутствует.
Полоса цифрового фильтра позволяет защитить измерительный тракт от единичных помех и задается в
единицах измеряемой величины. Если измеренное значение Ti отличается от предыдущего Ti- 1 на величину,
60
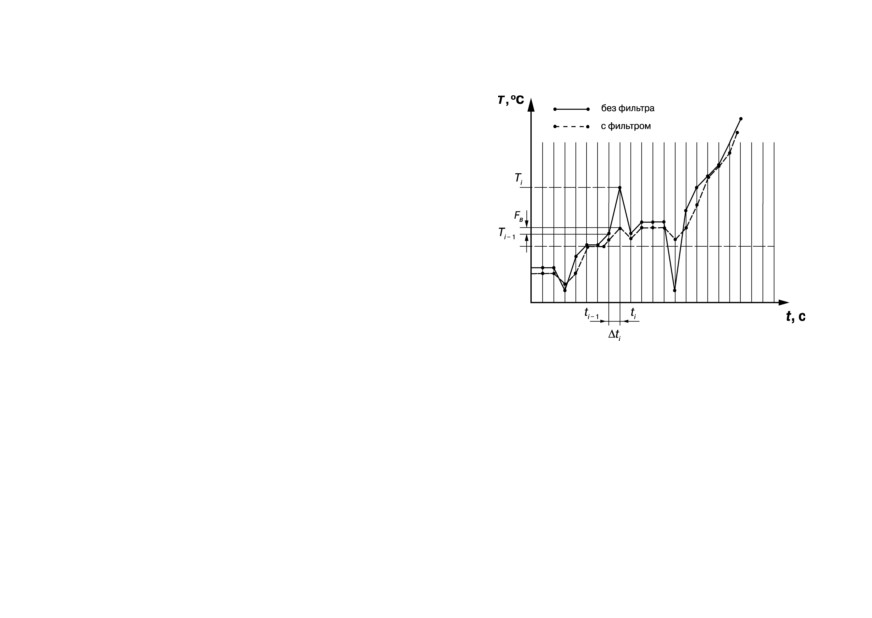
большую, чем значение параметра Fb, то прибор присваивает ему значение равное (Ti-1
+ Fb),
а полоса
фильтра удваивается. Таким образом, характеристика сглаживается.
Малая ширина полосы фильтра приводит к замедлению
реакции прибора на быстрое изменение входной величины.
Поэтому при низком уровне помех или при работе с быстро
меняющимися процессами рекомендуется увеличить
значение параметра или отключить действие полосы
фильтра, установив в параметре Fb = 0. В случае высокого
уровня помех следует уменьшить значение параметра для
устранения их влияния на работу прибора.
Цифровой фильтр устраняет шумовые составляющие
сигнала, осуществляя его экспоненциальное сглаживание.
Основной характеристикой экспоненциального фильтра
является tф
- постоянная времени цифрового фильтра.
Параметр inF
- интервал, в течение которого сигнал
достигает 0,63 от значения каждого измерения Ti.
Рисунок 7.4 - Сглаживание единичных
помех в зависимости от ширины полосы
цифрового фильтра
61

Рисунок 7.5 - Экспоненциальное сглаживание в зависимости от постоянной времени цифрового
фильтра
Уменьшение значения tф приводит к ускорению реакции прибора на скачкообразные изменения температуры,
но снижает его помехозащищенность. Увеличение tф повышает инерционность прибора и значительно
подавляет шумы.
7.3 Установка параметров процесса регулирования
Параметры процесса регулирования настраиваются в меню AdV.
62
7.3.1 Параметры вычислителя
Вычислитель расчитывает физическую величину по одному или нескольким входным значениям. В приборе к
вычислителю можно подключить только два источника данных, которыми являются собственные входы
прибора. Вычислитель жестко связан с регулятором. Входным параметром для ПИД-регулятора служат
данные с выхода вычислителя.
Прибор с функцией вычислителя позволяет реализовать наиболее распространенные задачи, например:
• регулирование соотношения (используя операцию вычисления отношения с любыми коэффициентами
K1, K2),
• вычисление и регулирование разности двух величин (используя операцию вычисления
средневзвешенной суммы, K1 = 1, K2 = -1),
• регулирование и измерение расхода с помощью диафрагм, сопел или трубок внтури (используя
операцию вычисления корня из средневзвешенной суммы с коэффициентами K1, K2).
Если на Вход 2 назначена функция измерительного входа (inP2 = in. t2), то прибор автоматически начинает
регулирование величины, вычисленной из значений, измеренных на входах прибора, по заданной формуле.
Формула вычислителя выбирается в параметре CALC:
• A.SUM - средневзвешенная сумма (К1 × PV1 + К2 × PV2);
• rat - отношение
;
• SQPV - корень из средневзвешенной суммы:
, где
- PV1- величина, измеренная на Входе 1;
- PV2 - величина, измеренная на Входе 2;
- К1, К2 - весовые коэффициенты Входа 1 и Входа 2.
• GrAF - коррекция уставки (см. раздел 7.3.2).
Весовые коэффициенты входов устанавливаются в параметре KPV1 (KPV2) в диапазоне от 19,99 до 99,99.
63
ПРЕДУПРЕЖДЕНИЕ
Если inP2 ≠ in.t2, параметры для настройки недоступны.
ВНИМАНИЕ
1. Значение KPV2 не должно быть равно 0 при CALC = rat, иначе на цифровом индикаторе будет
выдаваться ошибка вычисления.
2. При работе с вычислителем при различных значениях dPt1 и dPt2 (dP1 и dP2) значение с
вычислителя отображается на цифровом индикаторе с точностью, определенной в параметре
dPt1 (dP1).
7.3.2 Параметры графика коррекции уставки
В ряде случаев требуется, чтобы уставка не являлась константой, а изменялась в зависимости от какого-то
внешнего параметра. Например, в системах отопления температура теплоносителя должна меняться в
зависимости от температуры наружного воздуха. Для решения этой задачи в приборе введен график коррекции
уставки, который представляет собой зависимость корректирующего значения уставки от внешнего параметра.
Для графика можно задать до 10 узловых точек, которые автоматически соединяются отрезками в ломаную
линию. В качестве внешнего параметра используется величина, измеренная на Входе 2. В процессе работы
вычисленное по графику корректирующее значение прибавляется к уставке, и прибор будет поддерживать
вместо жестко заданной уставки скорректированное по графику значение:
Уставка конечная = Заданная уставка (SP) + Корректирующее значение уставки (SРкор)
Вид и механизм работы графика коррекции уставки для 1, 2…n точек показаны на рисунке 7.6.
64
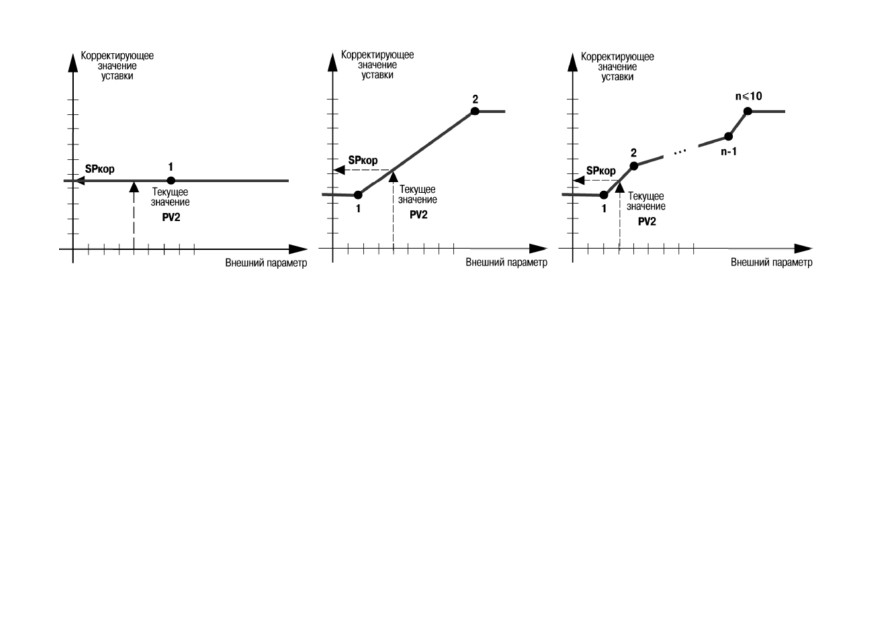
Рисунок 7.6 - График коррекции уставки
Если в качестве формулы вычислителя выбрана коррекция уставки (CALC = GrAF), то уставка регулятора будет
меняться в соответствии с заданным графиком.
Параметры графика коррекции уставки задаются в меню GrAF:
• nOdE - количество узловых точек в диапазоне 1...10;
• Xi и Yi - координаты узловых точек, где i - номер точки;
• X - значение внешнего параметра в диапазоне -1999...3000;
• Y - корректирующее значение уставки в диапазоне -1999...3000.
Для удаления точек в уже заданном графике следует уменьшить значение параметра nOdE. Будут удалены
координаты точек с большими номерами. Удалить точку в середине графика можно двумя способами:
• способ 1: изменить значение параметра nOdE и заново задать координаты точек, располагающихся после
удаленной;
65
• способ 2: не изменяя значения параметра nOdE, присвоить удаляемой точке координаты любой соседней
точки.
Для добавления одной или нескольких точек следует увеличить значение параметра nOdE. После этого в группе
GrAF появятся параметры X и Y для добавляемых точек. Задать координаты добавляемых точек в параметрах X
и Y. Порядок задания точек не имеет значения, поскольку в процессе работы прибор произведет
автоматическую сортировку, и точки расположатся на Графике в соответствии с координатами.
Если у двух и более последовательно расположенных точек заданы одинаковые значения параметра X, то при
значении внешнего параметра, равном X, корректирующее значение будет равно значению Y точки с меньшим
номером в этой группе точек.
Значение уставки с учетом коррекции по графику можно посмотреть в параметре Set. P. Параметр доступен
только по RS-485.
7.3.3 Задание диапазона уставки
Диапазон уставки задается с помощью параметров:
• SL-L - нижняя граница диапазона уставки;
• SL-H - верхняя граница диапазона уставки.
Параметры SL-L, SL-H могут принимать значения:
• минус 1999…+3000 при dP = 0;
• минус 199.9…+3000.0 при dP = 1;
• минус 19.99…+300.00 при dP = 2;
• минус 1.999…+30.000 при dP = 3.
7.3.4 Установка способа управления
Во время регулирования следует выбрать способ управления системой: прямое или обратное управление.
В случае прямого управления значение выходного сигнала регулятора увеличивается с увеличением
измеряемой величины. В случае обратного управления значение выходного сигнала регулятора уменьшается с
66
увеличением измеряемой величины. Например, в системе нагревания по мере роста температуры значение
выходного сигнала уменьшается, этот процесс имеет обратное управление.
Способ управления выбирается заданием соответствующего значения параметра OREU:
• OR-R - обратное управление, используется для систем нагревания;
• OR-D - прямое управление, используется для систем охлаждения.
7.4 Настройка ПИД-регулятора
7.4.1 Общие принципы ПИД-регулирования
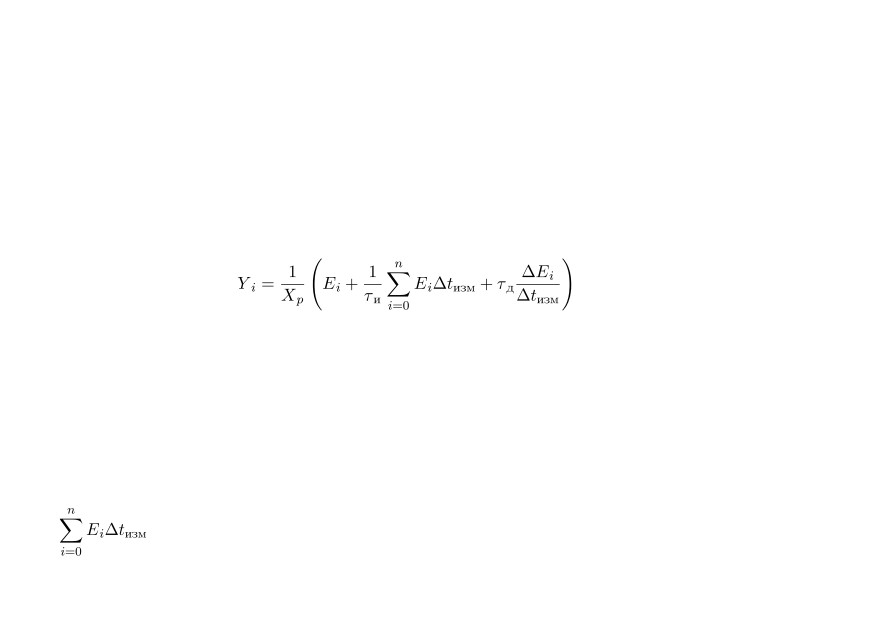
На выходе регулятора вырабатывается управляющий (выходной) сигнал Yi, действие которого направлено на
уменьшение отклонения Ei:
(7.4)
где Xp - полоса пропорциональности;
Ei - разность между заданными Tуст и текущими Ti значением измеряемой величины, или рассогласование;
τд - постоянная времени дифференцирования (настраиваемый параметр «дифференциальная постоянная
ПИД-регулятора» - d);
ΔEi - разность между двумя соседними измерениями Ei и Ei-1;
Δtизм - время между двумя соседними измерениями Ti и Ti-1;
τи
- постоянная времени интегрирования (настраиваемый параметр «интегральная постоянная ПИД-
регулятора» — i);
- накопленная сумма рассогласований.
67
Для эффективной работы ПИД-регулятора следует установить правильные для конкретного объекта
регулирования значения коэффициентов Xр, τд и τи, которые следует определить в режиме автонастройки или
ручной настройки.
В случае аналогового управления выходной сигнал ПИД-регулятора преобразуется в пропорциональный ему
ток или напряжение.
В случае управления трехпозиционным исполнительным механизмом выходной сигнал ПИД-регулятора
преобразуется в сигналы «больше», «меньше», «стоп» по следующему принципу:
1. Рассчитывается длительность импульса: tИМП = ΔY · tпх,
где: ΔY = Y(i) - Y(i-1) - приращение выходного сигнала,
tпх - время полного хода задвижки.
2. Выдается воздействие на исполнительный механизм:
• при ΔY > 0 включается ВУ1 («больше») на время, равное tИМП;
• при ΔY < 0 включается ВУ2 («меньше») на время, равное tИМП;
• при ΔY = 0 ВУ остаются в прежнем состоянии («стоп»).
7.4.2 Параметры настройки
7.4.2.1 Начальное значение регулируемой величины
Начальное значение регулируемой величины или значение регулируемой величины при нулевой мощности -
значение, которое будет поддерживаться при полностью закрытой задвижке. Оно задается в параметре PV0 в
соответствующих единицах измерения в диапазоне
- 100...2000. Заводская установка равна
20, что
соответствует комнатной температуре и подходит для большинства объектов регулирования.
От корректности установленного значения зависит точность определения коэффициентов ПИД-регулятора в
процессе автонастройки.
7.4.2.2 Скорость изменения уставки
Если значение уставки следует изменить в процессе работы, то переход с одного значения на другое можно
сгладить, задав «скорость изменения уставки».
68
Необходимая скорость оперативно задается как значение параметра VSP. Если значение параметра VSP
отлично от нуля, уставка меняется не скачком, а по линейному закону с заданной скоростью.
В качестве начальной уставки принимается текущее значение регулируемого параметра на момент включения
регулятора, тогда каждую минуту уставка регулятора изменяется на величину, заданную в этом параметре.
В случае использования скорости изменения уставки возрастает время выхода на рабочий режим. Поэтому,
если задержка приводит к неудовлетворительным результатам, нужно увеличить значение этого параметра
или отключить его действие.
7.4.2.3 Ограничение выходного сигнала
Ограничения выходного сигнала задаются в параметрах OL-L, OL-H и ORL.
Ограничение минимального значения выходного сигнала OL-L устанавливается в процентах и может принимать
значения от 0 до OL-H. Если рассчитанное значение выходного сигнала, в том числе в режимах «Ошибка» и
«Остановка регулирования», меньше установленного в параметре OL-L, на выход регулятора будет выдан
сигнал OL-L (%).
Ограничение максимального значения выходного сигнала OL-H устанавливается в процентах и может
принимать значения от OL-L до 100. Если рассчитанное значение выходного сигнала, в том числе в режимах
69

«Ошибка» и «Остановка регулирования», больше установленного в параметре OL-H, на выход регулятора
будет выдан сигнал OL-H (%).
Ограничение скорости изменения выходного сигнала
устанавливается в параметре ORL (в процентах в секунду,
%/с) и определяет максимально допустимую скорость
изменения выходного сигнала.
В приборе можно установить следующие виды ограничения
выходного сигнала: максимальное Yогр max и минимальное
Yогр min.
ПРЕДУПРЕЖДЕНИЕ
1. В приборе с ВУ ключевого типа параметры
OL-L и OL-H следует устанавливать только
при работе с датчиком положения (inP2 =
V.PRT или V.CS) для определения
минимальной и максимальной степени
открытия задвижки. В случае возникновения
Рисунок 7.7 - Ограничение выходного
ошибки датчика положения (Err.P)
сигнала
ограничители не работают.
2. Ограничения действуют в режимах
автоматического и дистанционного управления регулятором, а также в состояниях «Ошибка»
и «Остановка регулирования».
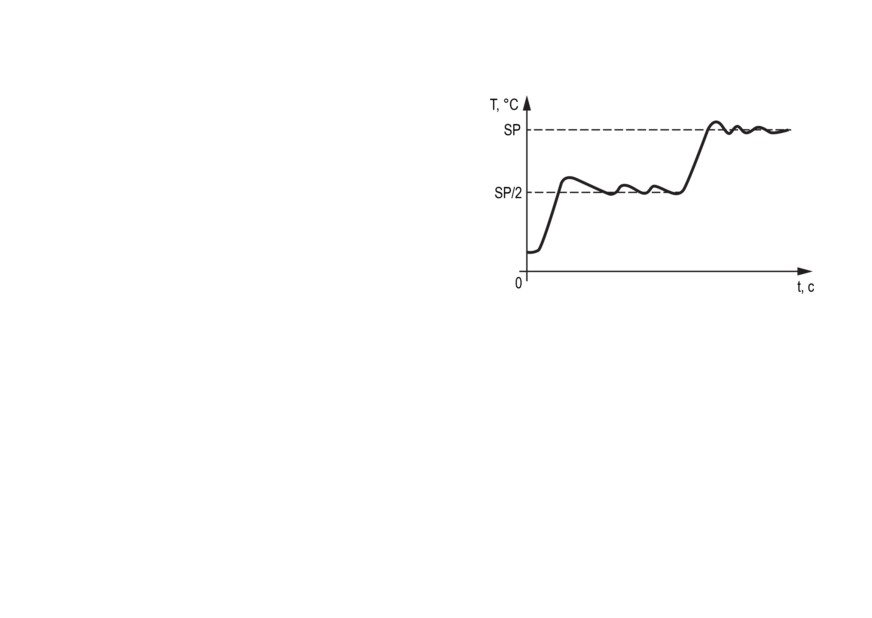
7.4.2.4 Установка режима быстрого выхода на уставку
Включение режима осуществляется заданием RAMP = ON.
Данный режим обеспечивает выход на заданное значение температуры с максимальной скоростью и
минимальным перерегулированием.
В начальный момент регулирования прибор работает по закону двухпозиционного регулирования. В случае
приближения измеряемой величины к значению уставки прибор начинает работать по ПИД-закону.
70
ВНИМАНИЕ
После включения режима, а также при изменении коэффициентов ПИД-регулятора (параметры P, I,
D), следует провести автонастройку.
7.4.2.5 Настройка состояния «Остановка регулирования»
В случае остановленного регулирования
(r-S
= StoP) ВУ дискретного типа переводятся в состояние,
определенное в параметре MVSt:
• CLOS - задвижка закрыта;
• OPEN - задвижка открыта;
• HOLD - задвижка остается в прежнем положении.
Для прибора с ВУ аналогового типа настройка состояния «остановка регулирования» отличается тем, что
существует возможность самостоятельно устанавливать произвольную мощность на выходе. При
остановленном регулировании ВУ переводятся в состояние, определенное в параметре MdSt:
• прибор выдает выходной сигнал, равный последнему, определенному до остановки регулирования,
значению выходного сигнала;
• MVSt - прибор выдает выходной сигнал, равный значению, установленному в параметре MVSt.
7.4.2.6 Настройка состояния «Ошибка»
В случае обнаружения ошибки или при срабатывании устройства «LBA»:
• прибор с ВУ аналогового типа прекращает регулирование, выдает и удерживает выходной сигнал,
равный значению, определенному параметром MVER;
• прибор с ВУ дискретного типа прекращает регулирование и выдает сигнал, требуемый для перевода
задвижки в состояние, определенное параметром MVER, после чего размыкает оба ВУ и ждет команд
извне.
Для сброса сигнала тревоги следует изменить значение параметра r-S:
1. Установить значение StOP.
2. Установить значение rUn для возобновления процесса регулирования.
71
7.4.3 Автонастройка
Автоматическая настройка
(автонастройка) предназначена для оптимальной настройки системы
регулирования непосредственно на объекте.
Для запуска автонастройки следует:
1. Задать уставку регулятора SP.
ПРЕДУПРЕЖДЕНИЕ
Значение задаваемой уставки должно составлять 0,75-0,85 от максимально допустимого
значения регулируемой величины для данного технологического процесса.
2. Задать значение rUn в параметре r-S.
3. Запустить настройку заданием значения rUn в параметре At. После запуска автонастройки включается
светодиод АН.
72
При автонастройке прибор работает как двухпозиционный регулятор. Система осуществляет колебания, вид
которых приведен на рисунке 7.8.
В результате автонастройки прибор вычисляет оптимальные
значения коэффициентов ПИД-регулятора (Xp, τи, τд) для
данной системы. Кроме того, происходит определение
постоянной времени входного сглаживающего фильтра ͳф,
периода следования управляющих импульсов Тсл и
рекомендуемого значения параметра RAMP. Полученные
значения автоматически записываются в память прибора.
После окончания автонастройки светодиод АН выключается,
прибор автоматически переходит к работе. В случае сбоя в
процессе
автонастройки
ее
выполнение сразу
прекращается, светодиод АН мигает. Поэтому при
выполнении автонастройки особое внимание надо уделить
защите прибора от различных внешних воздействий и
электромагнитных помех и устранить нежелательные
Рисунок 7.8 - Колебания в системе
внешние возмущения на объекте регулирования.
«нагреватель»
Если во время автонастройки произошел сбой, необходимо
остановить регулятор, выключить и снова включить питание прибора и заново запустить автонастройку.
73

Рисунок 7.9 - Колебания системы в режиме автонастройки прибора (1 - «нагреватель», 2 -
«холодильник»)
ВНИМАНИЕ
В режиме автоматической настройки сохраняется возможность для изменения параметров
функционирования и режимов работы прибора. Однако в процессе автоматической настройки этой
возможностью пользоваться не рекомендуется, так как изменение параметров или режимов
нарушает процесс настройки, но правильность расчета параметров регулятора не гарантируется.
74
ВНИМАНИЕ
Использовать автонастройку рекомендуется только в случаях, когда объект регулирования допускает
возникновение заметных колебаний технологического параметра относительно уставки. Если работа
в таком режиме недопустима, параметры ПИД-регулятора следует задавать вручную, исходя из
информации об инерционных свойствах объекта.
7.4.4 Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
• наличию колебаний;
• наличию перехода графика регулируемой величины через уставку.
ПРЕДУПРЕЖДЕНИЕ
В ряде случаев данные действия не могут обеспечить качественную настройку ПИД-регуляторов:
• системы с непрогнозируемыми внешними возмущающими воздействиями;
• системы с разнородными нагрузками (например, ГВС днем и вечером).
75

В зависимости от показателей корректировка параметров осуществляется по рекомендациям:
• Увеличение параметра Кп (уменьшение Xp)
способствует увеличению быстродействия
регулятора. Однако амплитуда колебаний
регулируемой величины может возрасти до
недопустимого уровня.
• Уменьшение Кп (увеличение Xp) способствует
уменьшению колебаний регулируемой величины,
вплоть до исчезновения. Однако при этом ухудшается
быстродействие регулятора и повышается
вероятность колебаний регулируемой величины..
• При завышенном значении Ти процесс подхода
регулируемой величины к уставке становится
односторонним даже при наличии колебаний. При
этом быстродействие регулятора уменьшается.
• При заниженном значении Ти появляется
значительный переход регулируемой величины через
уставку. Однако при этом существенно ухудшается
быстродействие регулятора и повышается
вероятность колебаний регулируемой величины.
• Увеличение Тд способствует повышению
быстродействия системы. Однако при этом
повышается ее чувствительность к помехам и
76

возможно появление высокочастотных колебаний регулируемой величины с малым периодом.
При оптимальной подстройке регулятора график
регулируемой величины должен иметь минимальное
значение показателя ошибки регулирования
(А1) при
достаточно степени затухания φ = 1 - А3/А1 (0,8 … 0,9).
7.4.5 Пример ручной настройки ПИД-регулятора
Для настройки ПИД-регулятора следует:
1. На приборе установить (диапазон параметров приведен в Приложении Настраиваемые параметры)
следующие значения:
• ХP = 9999;
• τи = 0;
• τд = 0.
2. Задать уставку.
3. В ходе наблюдений фиксировать значения регулируемого параметра (скорость и время подхода к
уставке).
4. В ходе настройки руководствоваться таблицей 7.1.
77
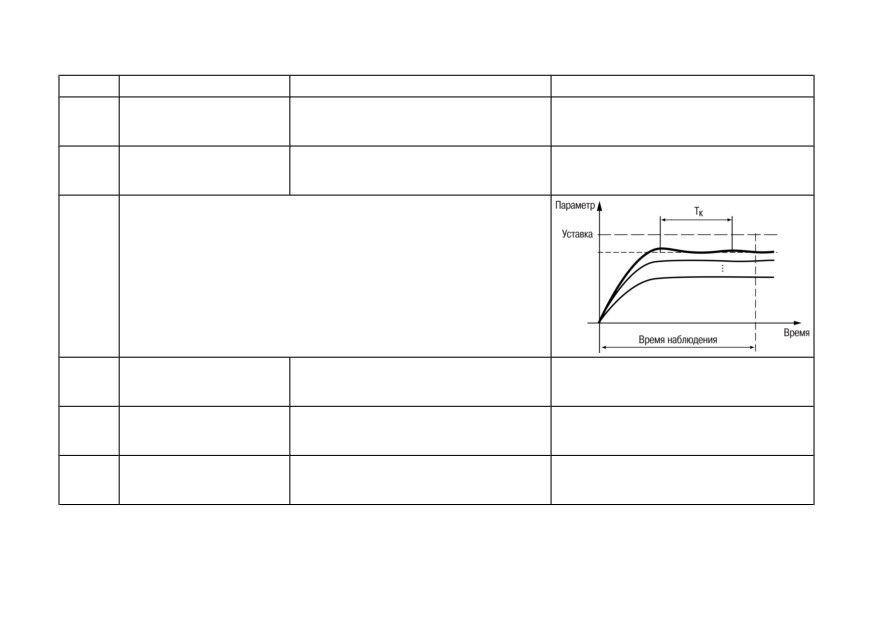
Таблица 7.1 - Описание шагов примера
Шаг
Параметры
Оценка процесса
Решение
1
ХP = 9999
Долго подходит к уставке, не пересекает
Уменьшить ХP (в два раза)
τи = 0
τд = 0
2
ХP = 5000
Быстрее подходит к уставке, не
Уменьшить ХP (в два раза)
τи = 0
пересекает
τд = 0
3
Сделать несколько итераций, до тех пор, пока появятся признаки
колебаний. Измерить период (Тк). Для следующей итерации можно
принять τи = Тк / 2 для ускорения процесса настройки
4
ХP = 500
Очень быстро подходит к уставке, не
Зафиксировать ХP , изменить τи
τи = Тк / 2
пересекает, колебательность усилилась
τд = 0
5
ХP = 500
Подходит к уставке, не пересекает
Уменьшить τи (в два раза)
τи = 2000
τд = 0
6
ХP = 500
Подходит к уставке, не пересекает
Уменьшить τи и ХP (в два раза)
τи = 1000
τд = 0
78
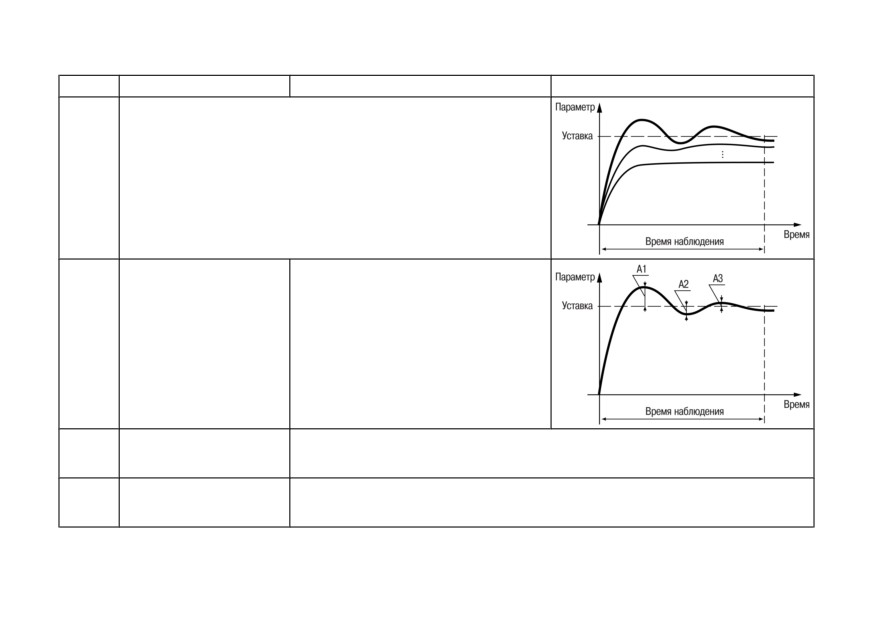
Продолжение таблицы 7.1
Шаг
Параметры
Оценка процесса
Решение
7
Сделать несколько итераций, до тех пор, пока регулируемая
величина не пересечет уставку и начнет колебания около этого
значения
8
ХP = 125
Регулируемая величина пересекла
τи = 250
уставку. Проверить соотношение
τд = 0
амплитуд А3 / А1 ≈ 0,1
Если колебания удовлетворяют условию
- регулятор настроен.
Если нет — фиксировать τи и ХP, задать
τд = τи / 5
9
ХP = 125
Проверить соотношение амплитуд А3 / А1 ≈ 0,1
τи = 250
Не удовлетворяет условию — уменьшить i на 10 %
τд = 50
10
ХP = 125
Регулятор настроен
τи = 250
τд = 40
79
7.5 Настройка компаратора и устройства LBA
Для более эффективного контроля над процессами регулирования в приборе имеется логическое устройство,
работающее по принципу компаратора, а также устройство определения обрыва контура LВА. Параметры
компаратора и устройства LBA настраиваются в меню AdV.
В случае срабатывания устройства диагностики обрыва контура регулирование останавливается и
засвечивается светодиод LBА. В случае срабатывания компаратора процесс регулирования продолжается, но
светится светодиод К2 и на ВУ2 подается аварийный сигнал. К ВУ2 могут быть подключены различные
сигнальные устройства: сирена, лампа, блокировочный выключатель, блок принудительного (аварийного)
охлаждения или нагревания и т. п.
ВНИМАНИЕ
Компаратор имеется только в приборах с ВУ1 аналогового типа. Свечение светодиода К2 в приборе с
ВУ1, ВУ2 дискретного типа свидетельствует не о срабатывании компаратора, а о подаче на ВУ2
сигнала на закрытие задвижки.
7.5.1 Настройка компаратора
В зависимости от системы регулирования следует задать параметры срабатывания компаратора,
сигнализирующего о выходе регулируемой величины за допустимые пределы.
Для этого следует выбрать один из 14 типов логики его срабатывания и установить требуемое значение в
параметре ALt.
Для устранения ненужных срабатываний из-за колебаний контролируемой величины около порогового
значения следует задать порог срабатывания компаратора Х и гистерезис HYS.
В случае срабатывания компаратора регулятор продолжает работать.
Функция блокировки первого срабатывания позволяет исключить включение сигнализации при подаче питания.
Данная функция используется в системах нагревания, т. к. значение измеряемой величины в этой системе
изначально находится ниже уставки SP.
80

Таблица 7.2 - Типы логики срабатывания компаратора
Параметр ALT
Тип сигнализации
Состояние выходного устройства
00
Сигнализация выключена (Заводская установка)
01
Измеренная величина выходит за заданный
диапазон
02
Измеренная величина превышает уставку SP
на X
03
Измеренная величина меньше уставки SP на X
04
Измеренная величина находится в заданном
диапазоне
05
Аналогично 01 с блокировкой первого срабатывания
06
Аналогично 02 с блокировкой первого срабатывания
07
Аналогично 03 с блокировкой первого срабатывания
81
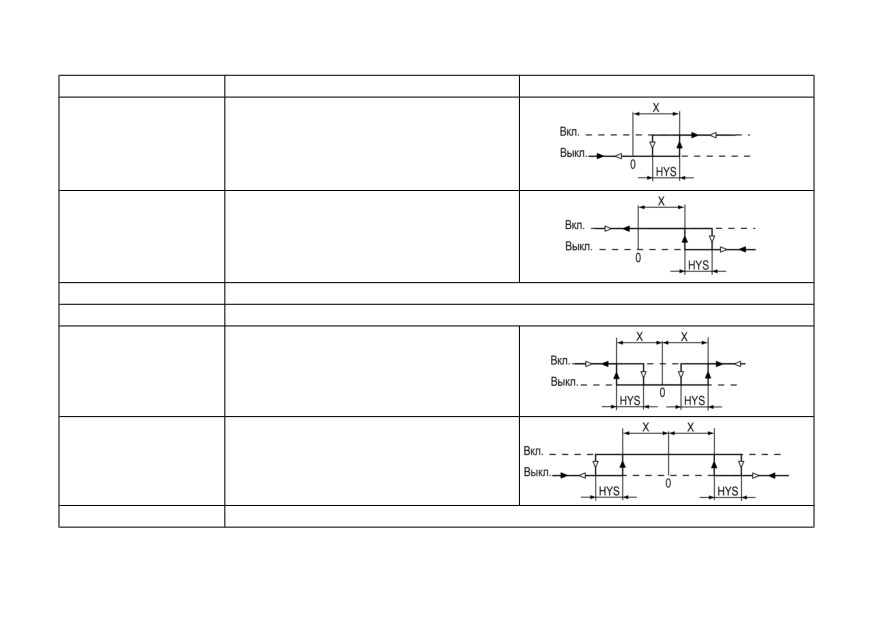
Продолжение таблицы 7.2
Параметр ALT
Тип сигнализации
Состояние выходного устройства
08
Измеренная величина превышает X по
абсолютному значению
09
Измеренная величина меньше X по
абсолютному значению
10
Аналогично 08 с блокировкой первого срабатывания
11
Аналогично 09 с блокировкой первого срабатывания
12
Измеренная величина выходит за диапазон ±
X
13
Измеренная величина находится в диапазоне
±X
14
Аналогично 12 с блокировкой первого срабатывания
82
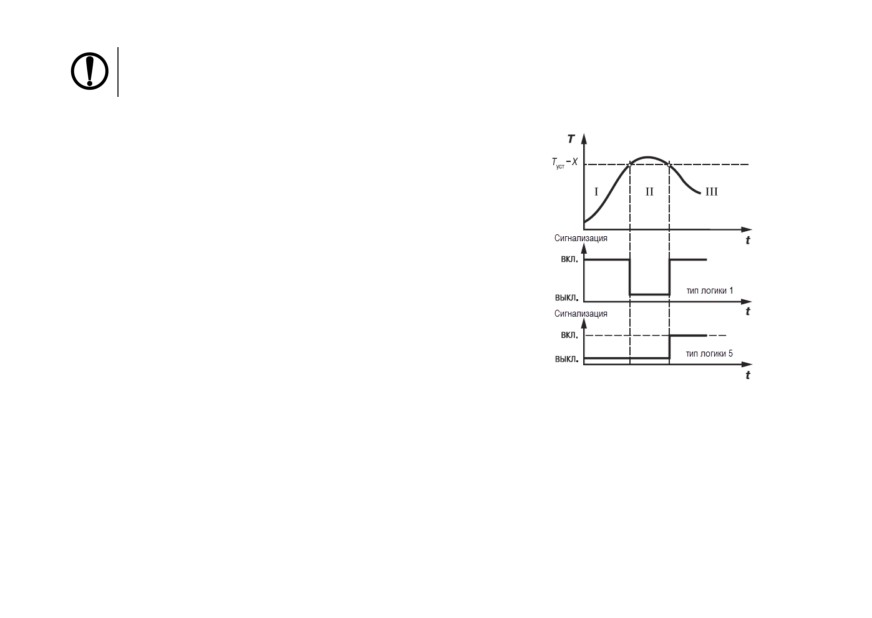
ПРЕДУПРЕЖДЕНИЕ
X — порог срабатывания, параметр Al — d (группа Adv);
Δ — гистерезис, параметр Al — H.
Рассмотрим пример сигнализации с типом логики 5 в системе нагревания.
На рисунке 7.10 показаны диаграммы работы компаратора
без блокировки первого срабатывания (тип логики 1) и с
блокировкой (тип логики 5).
В случае использования типа логики 1 в момент включения
прибора, когда регулируемая величина ниже порога Туст - Х,
происходит нежелательное срабатывание компаратора
(зона I), когда реально аварийной ситуации нет. При
использовании типа логики 5 нежелательного срабатывания
не происходит.
После включения прибора выход компаратора будет
находиться в состоянии «выкл» до первого превышения
порога Туст-Х, и только, когда регулируемая величина снова
выйдет на порог Туст- Х
(зона III), выход компаратора
впервые перейдет в состояние «включено» - сигнализация
сработает. Далее компаратор будет работать так же, как с
типом логики 1.
Рисунок 7.10 - Срабатывание сигнализации
После выбора логики срабатывания следует настроить
в системе нагревания
параметры:
• AL-d — порог срабатывания Х, задается в диапазоне от
нижней до верхней границы диапазона измерения используемого датчика;
• AL-H — гистерезис компаратора HYS, задается в диапазоне от 0 до верхней границы диапазона
измерения используемого датчика.
83
ПРЕДУПРЕЖДЕНИЕ
При включенном графике коррекции уставки (CALC = GrAF) порог срабатывания и гистерезис
отсчитываются от скорректированного значения уставки.
При установке в параметре ALt значения 0 компаратор будет выключен. Параметры AL-d, AL-H - недоступны.
84

7.5.2 Сигнализация об обрыве в контуре регулирования
Устройство LBA срабатывает в том случае, когда значение
регулируемого параметра не меняется в течение
определенного времени при подаче максимального
(минимального) управляющего воздействия. Это означает,
что в контуре регулирования произошел обрыв.
Работа сигнализации об обрыве контура задается двумя
параметрами:
• LBA - время диагностики обрыва контура, измеряется в
секундах;
• LBAb - ширина зоны диагностики обрыва контура,
задается в единицах измерения входной величины:
- от 0,0 до 999,9 - для температурных датчиков
(ТС и ТП);
- от 0 до 9999 - для датчиков с унифицированным
сигналом тока или напряжения.
Если LBA = 0, сигнализация об обрыве контура отключается,
параметр LBAb недоступен.
ВНИМАНИЕ
Параметры LBA можно устанавливать только для
приборов с ВУ аналогового типа и приборов с ВУ
дискретного типа с датчиком положения (
inP2 = V.PRT или V.CS).
Рисунок 7.11 - Срабатывание LBA
85
Устройство выдает сигнал тревоги, если по истечении времени диагностики обрыва контура измеренное
значение не изменилось:
• для процесса нагрева при максимальном выходном сигнале - не увеличилось, при минимальном - не
уменьшилось;
• для процесса охлаждения при максимальном выходном сигнале - не уменьшилось, при минимальном -
не увеличилось.
После выдачи сигнала регулятор отключается.
Для вычисления времени диагностики обрыва контура LBA следует:
1. Установить выходной сигнал на максимальный уровень.
2. Измерить время, за которое измеряемая величина изменится на ширину зоны диагностики обрыва
контура (по умолчанию ширина этой зоны равна 10).
3. Увеличить измеренное время вдвое и принять его за время диагностики обрыва контура.
Пример
В точке А нагреватель вышел из строя, и температура начинает уменьшаться (график 1, рисунок 7.11).
Регулятор увеличивает значение выходного сигнала (график 2, там же), контролируя отклик системы.
Поскольку температура продолжает уменьшаться, рассогласование растет, и значение Y достигает 100 %. В
момент достижения Y = 100 % (точка В) прибор начинает отсчет времени диагностики обрыва контура Δt.
Если по истечении этого времени температура продолжает уменьшаться, сигнализация срабатывает
(кривая I на графике 1). Если температура растет, но за время Δt изменение температуры не превысило
ширину зоны диагностики обрыва контура (кривая II на графике 1), сигнализация также срабатывает (график
3, там же).
86
7.6 Установка параметров задвижки
Для описания задвижки существуют параметры:
• V.Mot — полное время хода задвижки tпх, 5...999 секунд. Определяет время перемещения задвижки из
полностью открытой в полностью закрытую и наоборот (указывается в характеристиках самого
исполнительного механизма);
ПРЕДУПРЕЖДЕНИЕ
Параметр V.Mot является обязательным для настройки. Прибор не сможет управлять
задвижкой, если установлено некорректное значение этого параметра.
• V.GAP — время выборки люфта, 0...10 секунд;
• V.dB — зона нечувствительности задвижки. Параметр используется для защиты исполнительного
механизма от частых включений. Диапазон задания:
- 0...9999 мс — минимальная длительность включения исполнительного механизма, для ВУ
дискретного типа. Прибор будет выдавать выходной сигнал на исполнительный механизм, только
когда рассчитанная им длительность импульса включения (мощность) больше или равна V.dB. Не
выданные воздействия накапливаются до достижения V.dB.
- 0...100 % — минимальная степень открытия задвижки, для ВУ аналогового типа.
• V.rEV — время реверса или минимальное время простоя при смене направления движения, 0...10 секунд;
• V.tOF — пауза между импульсами доводки, 0...9 секунд или OFF. Подается после исчерпания времени
полного хода задвижки tпх и после каждого импульса доводки, пока не поступит сигнал от регулятора на
изменение направления хода задвижки. Импульсы доводки устраняют влияние ошибки
позиционирования задвижки при работе без датчика положения и обеспечивают полное открытие/
закрытие задвижки. Длительность импульса доводки (или мощность сигнала) равна длительности
последнего импульса до исчерпания tпх. Значения паузы между импульсами доводки:
- 0 — по исчерпании tпх импульс не выключается, пока от регулятора не поступит сигнал на смену
направления хода задвижки;
- 1...9 — время паузы в секундах перед каждым импульсом доводки;
87
- OFF — импульсы доводки не подаются.
ПРЕДУПРЕЖДЕНИЕ
Для прибора с ВУ аналогового типа параметры V.GAP, V.rEV и V.tOF недоступны.
Параметры V.GAP, V.dB, V.rEV рекомендуется устанавливать, если имеются точные или приблизительные данные
об их значениях, это повысит качество регулирования и продлит срок службы исполнительного механизма.
Одновременное использование параметров V. GAP и V. tOF нецелесообразно, поскольку при включенном
доводчике люфт автоматически компенсируется.
ПРЕДУПРЕЖДЕНИЕ
Неточное задание параметров при управлении реальной задвижкой может привести к накоплению
рассогласования. В результате сигнал на открытие или на закрытие может быть подан, когда
реальная задвижка уже полностью открыта/закрыта. Это может повлечь за собой поломку
оборудования, поэтому рекомендуется использовать задвижки с концевыми выключателями.
7.7 Настройка режимов индикации
По умолчанию на верхний цифровой индикатор выводится измеренная на Входе 1 величина, на нижний -
значение уставки. Для отображения дополнительных величин следует выбрать режим индикации.
88

Таблица 7.3 - Настройка режимов индикации
Режим индикации
1
2
3
4
5
(только для прибора с ВУ
аналогового типа)
Верхний ЦИ
Величина, измеренная на Входе 1
Значение на
Величина,
Значение на
выходе
измеренная на
выходе
вычислителя
Входе 1
вычислителя
Нижний ЦИ
Значение уставки
Величина,
Значение уставки
Выходная мощность ПИД-регулятора
измеренная на
Входе 2
Каждый из режимов может отдельно включаться или выключаться в группе diSP, в параметрах diS1 - diS5
соответственно. Для этого в параметрах устанавливается On
- для включения индикации, OFF
- для
выключения.
ПРЕДУПРЕЖДЕНИЕ
Для индикации значения с датчика положения задвижки следует использовать режим индикации 2.
Не рекомендуется включать более двух режимов индикации, поскольку в приборе не предусмотрена
индикация обозначения выводимых параметров. Определить, значения каких параметров в данный
момент отображены на цифровом индикаторе, можно только косвенно: в режимах индикации 1 и 3
светится светодиод УСТ, индицирующий режим редактирования уставки.
Параметры DIS2 — DiS5 скрыты, если использование режима индикации невозможно. Например,
diS3 скрыт, когда к Входу 2 ничего не подключено, подключен датчик положения или ключ. Когда
параметр DIS скрыт, режим индикации, который он задает, автоматически выключается.
Прибор автоматически переходит из настройки к работе (к индикации измеряемых величин) по
истечении времени, установленного в параметре rEt (группа diSP). При установке rEt = OFF возврат к
индикации измеряемых величин производится через меню прибора.
89

7.8 Настройка обмена данными через интерфейс RS-485
Настройка обмена данными осуществляется параметрами группы COMM:
• PROT - протокол обмена данными (ОВЕН, ModBus-RTU, ModBus-ASCII);
• bPS - скорость обмена в сети; допустимые значения - 2400, 4800, 9600, 14400,19200, 28800, 38400,
57600, 115200 бит/с;
• Addr - базовый адрес прибора, диапазон значений:
- 0…255 при Prot = OWEN и A.LEN = 8;
- 0…2047 при Prot = OWEN и A.LEN = 11;
- 1…247 при Prot = M.RTU или M.ASC .
• A.Len - длина сетевого адреса (8 или 11 бит);
• rSdL - задержка ответа прибора по RS-485 (1-45 мс).
Значения параметров обмена, которые не отображаются на цифровом индикаторе, т. к. их нельзя изменить
вручную, перечислены в таблице 7.4.
Таблица 7.4 - Фиксированные параметры обмена данными
Параметр
Имя
Протокол
ОВЕН
ModBus RTU
ModBus ASCII
Количество стоп-бит
Sbit
1
2
2
Длина слова данных
LEn
8 бит
8 бит
7 бит
Контроль четности
PrtY
нет
нет
нет
ВНИМАНИЕ
• «Базовый адрес» следующего прибора в сети задается как: «Базовый адрес» прибора + 2.
• Новые значения параметров обмена вступают в силу только после перезапуска прибора или
перезапуска по RS-485.
90
ПРЕДУПРЕЖДЕНИЕ
Минимальный период опроса параметров по протоколу ОВЕН для приборов с ВУ аналогового типа
должен быть не менее 0,5 секунды.
7.8.1 Работа с параметрами по протоколу ОВЕН
Каждый параметр имеет имя, состоящее из латинских букв (до четырех), которые могут быть разделены
точками, и название. Например: «Длина сетевого адреса A.Len», где «Длина сетевого адреса» - название, A.
Len - имя.
Параметры прибора разделяются на две группы: настраиваемые и оперативные.
Настраиваемые параметры следует задавать либо кнопками на лицевой панели прибора, либо через
сетевой интерфейс с помощью программы «Конфигуратор».
Значения настраиваемых параметров хранятся в энергонезависимой памяти прибора и сохраняются в случае
выключения питания.
Настраиваемые параметры могут иметь также индекс
- цифру, отличающую параметры однотипных
элементов. Индекс передается вместе со значением параметра.
Оперативные параметры переносят информацию о текущем состоянии прибора или объекта регулирования:
измеренные или вычисленные значения, выходные мощности регуляторов, номера запущенных в данный
момент программ, текущие состояния выходных элементов и т. д.
Оперативные параметры индексируются через сетевой адрес. Для считывания измеряемого значения с
входа 1 следует прочитать значение параметра PV с сетевым адресом, заданным в параметре Addr, для
считывания измеряемого значения с входа 2 - с сетевым адресом Addr +1.
7.8.2 Работа с параметрами по протоколу ModBus
Регистр STAT — регистр статуса, который показывает текущее состояние прибора, например - наличие
ошибки на входе, срабатывание ВУ, LBA, текущий режим управления
(автоматический ручной или
дистанционный), состояние регулятора (запущен или остановлен) или выполнение АНР.
91
Полный перечень регистров и поддерживаемых функций ModBus, описание битов STAT и типов данных
приведены в документе «Краткая инструкция по работе с измерителем - ПИД-регулятором ТРМ212 по
интерфейсу RS-485».
7.9 Защита от несанкционированного доступа
Для защиты настраиваемых параметров от нежелательных изменений существуют три параметра секретности
OAPt, WtPt и EdPt, работающих по схеме «ИЛИ».
Доступ к этим параметрам осуществляется через код доступа PASS = 100.
ПРЕДУПРЕЖДЕНИЕ
Независимо от значений параметров OAPt и WtPt параметры прибора могут быть изменены с
помощью управляющего устройства в сети RS-485 (компьютера).
7.9.1 Защита параметров от просмотра
В случае запрета на просмотр параметров с лицевой панели, они не будут отображаться на индикаторе. Для
запрета просмотра определенных настраиваемых параметров или их групп следует задать соответствующее
значение параметра OAPt.
7.9.2 Защита параметров от изменения
В параметре WtPt устанавливается запрет записи значений настраиваемых параметров. Возможность
просмотра ранее установленных значений сохраняется.
7.9.3 Защита отдельных параметров от просмотра и изменений
Каждый параметр прибора имеет атрибут редактирования, установка которого производится с компьютера
через интерфейс RS-485. Атрибут редактирования принимает два значения: редактируемый и
нередактируемый.
92

Параметр EDPT, находящийся в группе SECR прибора (доступ к группе осуществляется через код PASS=100),
управляет возможностью просмотра и редактирования параметров с учетом установленных атрибутов.
В случае, когда EDPT
= ON, все параметры, в которых атрибут редактирования принимает значение
нередактируемый, становятся невидимыми.
В случае, когда EDPT = OFF, все параметры, независимо от значения атрибута редактирования, будут видимыми.
Если в группе все параметры невидимы, то вся группа становится невидимой.
7.10 Восстановление заводских установок
В приборе имеется функция восстановления значений параметров, установленных на заводе-изготовителе.
Для восстановления заводских установок следует:
1. Отключить прибор от сети на 1 минуту.
2. Одновременно удерживая кнопки
и
, включить питание прибора.
3. В случае появления на верхнем индикаторе [- - - -] отпустить кнопки.
Заводские установки восстановлены.
8 Техническое обслуживание
8.1 Общие указания
Во время выполнения работ по техническому обслуживанию прибора следует соблюдать требования
безопасности из раздела 3.
93
Техническое обслуживание прибора проводится не реже одного раза в 6 месяцев и включает следующие
процедуры:
• проверка крепления прибора;
• проверка винтовых соединений;
• удаление пыли и грязи с клеммника прибора.
8.2 Юстировка
Юстировка должна производиться только квалифицированными специалистами метрологических служб при
увеличении погрешности измерения входных параметров сверх установленных значений.
Юстировка прибора заключается в проведении ряда операций, обеспечивающих восстановление его
метрологических характеристик в случае изменения их в ходе длительной эксплуатации прибора.
ВНИМАНИЕ
Необходимость проведения юстировки определяется по результатам поверки прибора только
квалифицированными специалистами метрологических служб, осуществляющих эту поверку.
Методика юстировки зависит от типа используемого датчика.
Для проведения юстировки на вход прибора подается эталонный сигнал.
Во время юстировки прибор вычисляет соотношения между поступившими входными сигналами и сигналами
соответствующих опорных точек схемы. Вычисленные соотношения (коэффициенты юстировки) записываются
в энергонезависимую память и используются в дальнейшем для вычисления входных величин.
8.2.1 Вычисление коэффициентов юстировки
Вычисление коэффициентов юстировки производится при изменении значений настраиваемых параметров в
группе CALB.
94
Для проведения юстировки следует:
1. Нажать одновременно
+
+
и удерживать до появления PASS.
2. Установить код 104. Нажать
3. Перейти к параметру юстировки:
• CLB1 — юстировка измерительной характеристики входа 1;
• CLB2 — юстировка измерительной характеристики входа 2.
4. Установить значение rUn (запуск юстировки) для выбранного параметра и нажать
Рисунок 8.1 - Запуск юстировки
В течение 2 секунд прибор производит измерение эталонных сигналов, подключенных к входу.
На индикаторе значение параметра CLb1 (CLB2) отобразится как:
• STOP — получен правильный результат юстировки;
95

• ERCL — ошибка юстировки.
Возможные причины ошибки юстировки:
• неправильное подключение источника эталонного сигнала к прибору;
• неправильное значение эталонного сигнала;
• неисправность прибора.
После устранения причины ошибки следует повторить юстировку.
8.2.2 Юстировка прибора для работы с ТС
Для проведения юстировки следует:
1. Подключить к входу прибора вместо датчика магазин
сопротивлений типа Р4831 (или подобный ему с
классом точности не более 0,05). Соединение
прибора с магазином следует производить по
трехпроводной схеме подключения. Сопротивления
проводов линии должны отличаться не более чем на
0,05 %.
2. Включить питание прибора и установить код датчика
в параметре in.t , соответствующий используемому
типу датчика.
Рисунок 8.2 - Схема подключения при
юстировке ТС
3. Установить на магазине значение сопротивления в
соответствии с таблицей 8.1.
4. Перевести прибор в режим измерения входной величины.
5. Через 5-10 секунд проконтролировать показания прибора. Эти показания должны быть равны (0,0 ±
0,2) °С.
Если абсолютная погрешность измерения в этой точке превышает 0,2 ° С, следует вычислить коэффициенты
юстировки. Затем проверить результаты юстировки. Показания верхнего ЦИ должны быть равны (0,0 ± 0,2) °С.
96
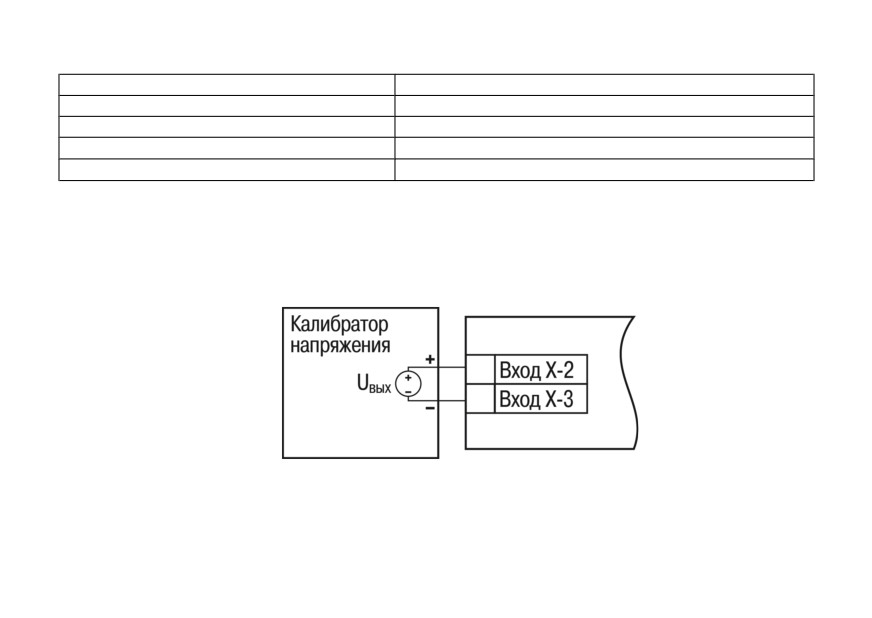
Таблица 8.1 - Эталонные сигналы
Тип датчика
Значение сигнала Rн, Ом
ТСМ100, ТСП100
100
ТСМ50, ТСП50
50
ТСМ гр. 23
53
ТСП гр. 21
46
8.2.3 Юстировка прибора для работы с ТП
Для проведения юстировки следует:
1. Подключить к входу прибора вместо датчика дифференциальный вольтметр В1-12 в режиме
калибратора напряжения или аналогичный ему источник эталонного напряжения с классом точности не
более 0,05.
Рисунок 8.3 - Подключение калибратора тока
2. Включить питание прибора и установить код датчика в параметре in.t , соответствующий
используемому типу датчика.
97
3. Установить на выходе вольтметра В1-12 напряжение, соответствующее типу используемого датчика, см.
таблицу 8.2.
ВНИМАНИЕ
Выходное напряжение калибратора должно оставаться неизменным в процессе выполнения
юстировки и проверки результатов юстировки.
4. Выключить схему компенсации температуры свободных концов, установив в параметре WXC значение
OFF. Параметр отключения схемы компенсации температуры свободных концов ТП WXC находится в
группе параметров юстировки. Доступ к группе осуществляется через код 104.
Рисунок 8.4 - Последовательность настройки в случае юстировки ТП
5. Перевести прибор в режим индикации показаний.
6. Через 5-10 секунд проконтролировать показания прибора. Эти показания должны быть равны
значениям в таблице 8.2.
Если абсолютная погрешность измерения в этой точке превышает 0,2 ° С, следует вычислить коэффициенты
юстировки. Затем проверить результаты юстировки. Показания верхнего ЦИ должны быть равны (0,0 ± 0,2) °С.
Таблица 8.2 - Эталонные сигналы
Тип ТП
Значение сигнала, мВ
Показания прибора, °С
ТХК (L)
500,0 ± 2
ТХА (К)
975,0 ± 2
40,299
ТНН (N)
1105 ± 2
ТЖК (J)
718,6 ± 2
98

Продолжение таблицы 8.2
ТВР (А-1)
1269 ± 4
ТВР (А-2)
1256 ± 4
ТВР (А-3)
20,146
1281 ± 4
ТМК (T)
388 ± 4
ТПП (R)
1694 ± 4
ТПП (S)
15,00
1452 ± 4
Термопара ТПР (B)
10,073
1498 ± 4
Если погрешность измерения в этой точке превышает приведенную в таблице величину, следует выполнить
вычисление коэффициентов юстировки. Если погрешность не превышает приведенных выше значений,
юстировка не требуется.
8.2.4 Юстировка прибора для измерения сигналов постоянного тока и напряжения
Для проведения юстировки следует:
1. Подключить к входу прибора вместо датчика дифференциальный вольтметр В1-12 в режиме
калибратора тока, или аналогичный ему источник эталонного постоянного тока с классом точности не
более 0,05. Тип используемого резистора С2-29 В, сопротивление 100 Ом ± 0,05 %.
99

1)
2)
Рисунок 8.5 - 1) постоянный ток, 2) постоянное напряжение
2. Включить питание прибора и установить код датчика в параметре in.t, соответствующий используемому
типу датчика.
3. Установить в параметре in.L значение 0.0, а в параметре in.H - значение 100.0.
4. Задать на выходе В1-12 значение тока/напряжения, соответствующее типу установленного датчика.
Таблица 8.3 - Эталонные сигналы
Тип датчика
Значение сигнала, мА
Унифицированный сигнал постоянного тока
от 0 до 20 мА, от 4 до 20 мА
20
от 0 до 5 мА
5
Унифицированный сигнал постоянного напряжения
от 0 до1 В
1В
от -50 до 50 мВ
50 мВ
100

ВНИМАНИЕ
Во время выполнения работ выходной ток калибратора должен оставаться неизменным.
5. Перевести прибор в режим индикации показаний.
6. Через 5-10 секунд проконтролировать показания прибора. Эти показания должны быть равны
значениям в таблице выше.
Если абсолютная погрешность измерения в этой точке превышает 0,2 ° С, следует вычислить коэффициенты
юстировки. Затем проверить результаты юстировки. Показания верхнего ЦИ должны быть равны (0,0 ± 0,2) °С.
Если погрешность не превышает приведенных выше значений, юстировка не требуется.
8.2.5 Юстировка датчика температуры свободных концов ТП
Для проведения юстировки следует:
1. Подключить, соблюдая полярность соединения, к первому входу прибора свободные концы ТП.
2. Поместить рабочий спай ТП в сосуд, содержащий смесь льда и воды (температура смеси 0 °С).
3. Включить питание прибора и установить код датчика в параметре in.t, соответствующий типу
подключенной ТП.
4. Перевести прибор в режим индикации показаний и оставить прогреваться на 20 минут.
5. Установить в параметре CLbS значение rUn и нажать кнопку
, как показано на рисунке 8.6.
101
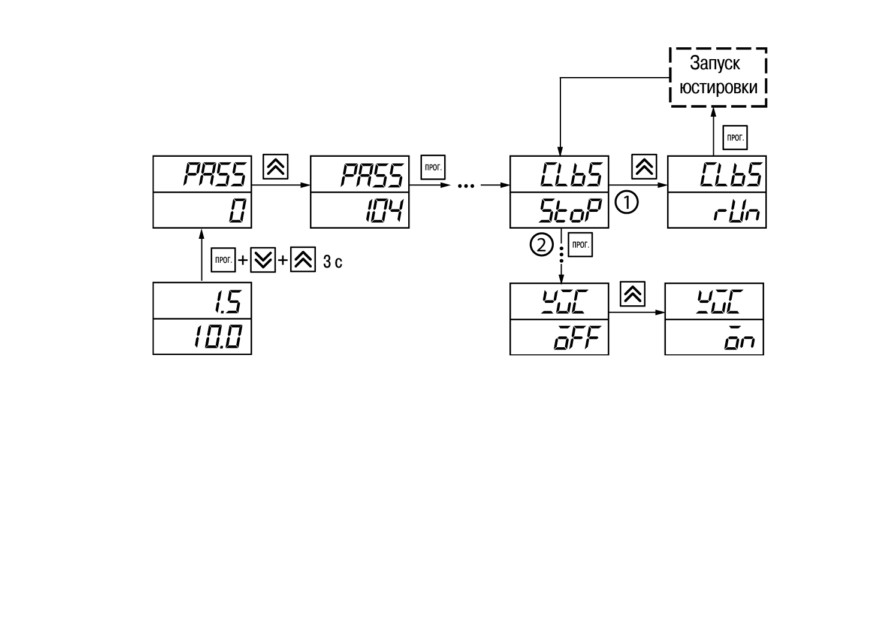
Рисунок 8.6 - Последовательность работы при юстировке
6. Включить автоматическую коррекцию ЭДС ТП по температуре его свободных концов, установив в
параметре WXC значение On.
7. Проверить результаты юстировки. В режиме измерения показания на верхнем ЦИ должны быть равны
значению 0 °С с абсолютной погрешностью не более 1,0 °С.
Если абсолютная погрешность измерения в этой точке превышает 0,1 ° С, следует вычислить коэффициенты
юстировки. Затем проверить результаты юстировки.
102

8.2.6 Юстировка датчика положения задвижки
Для юстировки следует выполнить действия:
1. Подключить к второму входу прибора датчик положения.
2. Включить питание прибора и установить тип датчика положения (параметр inP2).
3. Установить в параметре diS2 значение On. Для удобства в других параметрах diS установить значение
OFF.
4. Если на концах задвижки установлены физические ограничители (концевики), предварительно
установить в параметрах OL-L, OL-H значения, соответствующие фактическим крайним положениям.
ПРЕДУПРЕЖДЕНИЕ
Параметры OL-L, OL-H следует использовать, если есть необходимость юстировать датчик
положения не в крайних, а промежуточных положениях. Для этого команду CLV.C выполнить в
положении, соответствующем OL-L, команду CLV.O - в положении, соответствующем OL-H,
после чего изменить значения OL-L, OL-H на фактические.
5. Войти в группу CALB , для этого нажать одновременно
+
+
и удерживать до появления
PASS.
6. Установить код 104, после набора кода нажать
7. Установить задвижку в крайнее закрытое положение.
8. Перейти к параметру «Юстировка датчика положения для полностью закрытой задвижки» CLV.C.
Установить значение rUn (запуск юстировки) и нажать
. В течение 2 секунд прибор вычислит
коэффициента юстировки датчика для крайнего закрытого положения задвижки.
9. Установить задвижку в крайнее открытое положение.
10. Выполнить аналогичные действия для параметра «Юстировка датчика положения для полностью
открытой задвижки» CLV.O.
103
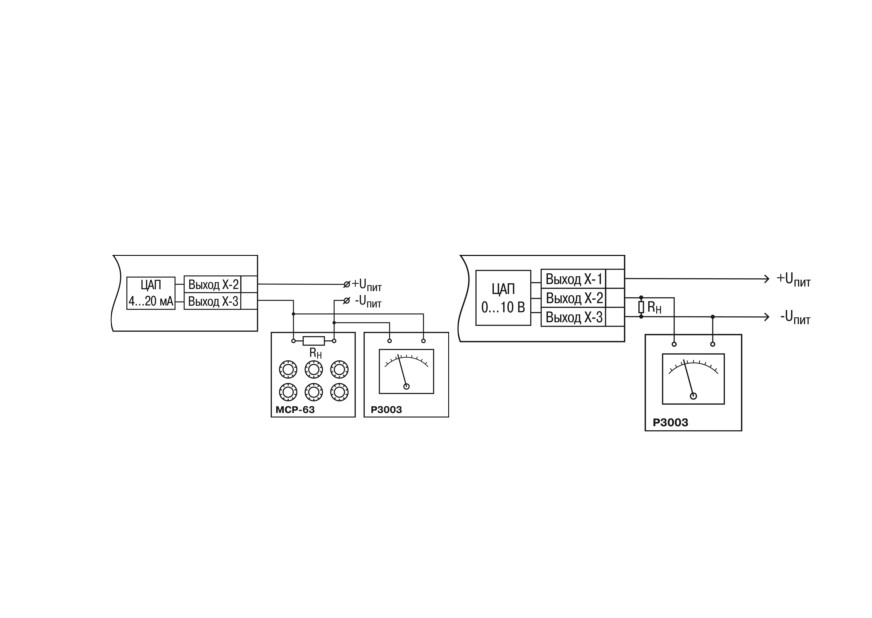
Погрешность при измерении сигналов с датчика положения производителем не устанавливается, поэтому
качество юстировки определяется в зависимости от решаемых системой задач.
Для проверки результата юстировки следует установить задвижку в любое положение и проконтролировать
показания на нижнем цифровом индикаторе в рабочем режиме. Если результат калибровки не устраивает,
следует провести повторную юстировку датчика положения.
8.2.7 Юстировка выходных устройств типа «И» и «У»
Для юстировки ВУ следует:
1. Подключить ВУ типа «И» (ЦАП «параметр - ток 4...20 мА») или ВУ типа «У» (ЦАП «параметр -
напряжение 0...10 В») по схемам, приведенным на рисунке 8.7 и на рисунке 8.8 соответственно.
Рисунок 8.7 - Подключение ВУ1 типа И (RН=500 Ом)
Рисунок 8.8 - Подключение ВУ1 типа У
Напряжение источника питания должно быть в диапазоне 15...28 В. В качестве измерителя напряжения
может быть использован прибор для калибровки вольтметров Р3003 или иной прибор того же класса с
разрешающей способностью 0,001 В.
104
2. Для доступа к группе CALB одновременно нажать кнопки
+
+
и удерживать до появления
PASS.
3. Ввести код 100 и нажать
4. Кнопками
и
выбрать параметр «Коэффициент юстировки минимальной границы выходного
сигнала для ЦАП» i1-0. Изменяя значение параметра, добиться, чтобы показания вольтметра
ровнялись:
• 2,0 В — при юстировке ЦАП 4...20 мА;
• 0,0 В — при юстировке ЦАП 0...10 В.
5. Нажать кнопку
. На индикаторе отобразится параметр «Коэффициент юстировки максимальной
границы выходного сигнала для ЦАП» i1-1.
6. Изменяя значение параметра i1-1, добиться, чтобы показания вольтметра равнялись 10,0 В.
7. Нажать кнопку
Для выхода из режима юстировки следует удерживать кнопку
в течение 6 секунд.
9 Маркировка
На корпус прибора нанесены:
• наименование прибора;
• степень защиты корпуса по ГОСТ 14254;
105
• напряжение и частота питания;
• потребляемая мощность;
• класс защиты от поражения электрическим током по ГОСТ 12.2.007.0;
• знак утверждения типа средств измерений;
• знак соответствия требованиям ТР ТС (ЕАС);
• страна-изготовитель;
• заводской номер прибора и год выпуска.
На потребительскую тару нанесены:
• наименование прибора;
• знак соответствия требованиям ТР ТС (ЕАС);
• страна-изготовитель;
• заводской номер прибора и год выпуска.
10 Упаковка
Упаковка прибора производится в соответствии с ГОСТ 23088-80 в потребительскую тару, выполненную из
коробочного картона по ГОСТ 7933-89.
Упаковка прибора при пересылке почтой производится по ГОСТ 9181-74.
11 Транспортирование и хранение
Прибор должен транспортироваться в закрытом транспорте любого вида. В транспортных средствах тара
должна крепиться согласно правилам, действующим на соответствующих видах транспорта.
Условия транспортирования должны соответствовать условиям
5
по ГОСТ 15150-69
при температуре
окружающего воздуха от минус 25 до плюс 55 °С с соблюдением мер защиты от ударов и вибраций.
Прибор следует перевозить в транспортной таре поштучно или в контейнерах.
106

Условия хранения в таре на складе изготовителя и потребителя должны соответствовать условиям 1 по ГОСТ
15150-69. В воздухе не должны присутствовать агрессивные примеси.
Прибор следует хранить на стеллажах.
12 Комплектность
Наименование
Количество
Прибор
1 шт.
Паспорт и Гарантийный талон
1 экз.
Руководство по эксплуатации
1 экз.
Комплект крепежных элементов
1 к-т
Комплект резисторов (поставляется по отдельному заказу) 100 Ом, 10 шт.
1 к-т
Комплект резисторов (поставляется по отдельному заказу) 100 Ом, 50 шт.
1 к-т
Методика поверки (по требованию заказчика)
1 экз.
ПРИМЕЧАНИЕ
Изготовитель оставляет за собой право внесения дополнений в комплектность прибора.
13 Гарантийные обязательства
Изготовитель гарантирует соответствие прибора требованиям ТУ при соблюдении условий эксплуатации,
транспортирования, хранения и монтажа.
Гарантийный срок эксплуатации - 24 месяца со дня продажи.
107
В случае выхода прибора из строя в течение гарантийного срока при соблюдении условий эксплуатации,
транспортирования, хранения и монтажа предприятие-изготовитель обязуется осуществить его бесплатный
ремонт или замену.
Порядок передачи прибора в ремонт содержится в паспорте и в гарантийном талоне.
108

Приложение А. Настраиваемые параметры
Таблица А.1 - Перечень настраиваемых параметров
Параметр
Допустимые
Заводская
Комментарии
Обозначение
Наименование
значения
установка
Группа LVOP (LVOP). Рабочие параметры прибора
PV1, PV2
Измеренная величина
Диапазон
[ед. изм.]
—
(PV1, PV2)
на Входе 1*, на
измерения датчика
Параметры не настраиваются
Входе 2**
1, датчика 2
LUPV
Значение на выходе
Ограничения на
—
(LUPV)
вычислителя*
цифровом
индикаторе
-1999…9999
SP
Уставка регулятора*
Определяется
На ЦИ обозначение параметра не
30.0
(SP)
параметрами SL-L
отображается
и SL-H
SET.P
Текущее значение
SL−L и SL−H
Значение уставки с учетом коррекции
—
(Set.P)
уставки работающего
по графику или заданной скорости ее
регулятора
изменения (VSP).
Параметр доступен только по RS-485.
r-S
Запуск\остановка
rUn
Регулятор работает
StOP
(r-S)
регулирования
StOP
Регулятор остановлен
At
Запуск\остановка
Не появляется при r-S = StOP
StOP
(At)
автонастройки
rUn - запускается режим автонастройки.
StOP - автонастройка выключена.
O
Выходная мощность
0,0…100,0
Только для прибора с ВУ1 аналогового
—
(O)
ПИД-регулятора
типа
[%] Параметр не настраивается.
109
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
Группа init (init). Параметры входов прибора
in.t1, in.t2
Тип входного датчика
r385
Pt 50 (α = 0,00385 °С -1)
E__L
(in.t1, in.t2)
или сигнала для Входа
1, для Входа 2
r.385
Pt 100 (α = 0,00385 °С -1)
r391
50П (α = 0,00391 °С -1)
r.391
100П (α = 0,00391 °С -1)
r-21
46П (α = 0,00428 °С -1)
r.426
Cu 100 (α = 0,00426 °С -1)
r426
Cu 50 (α = 0,00426 °С -1)
r-23
53М (α = 0,00426 °С -1)
r428
50М (α = 0,00428 °С -1)
r.428
100М (α = 0,00428 °С -1)
E_A1
термопара ТВР (А-1)
E_A2
термопара ТВР (А-2)
E_A3
термопара ТВР (А-3)
E__b
термопара ТПР (В)
E__J
термопара ТЖК (J)
E__K
термопара ТХА (К)
E__L
термопара ТХК (L)
E__n
термопара ТНН (N)
110

Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
E__r
термопара ТПП (R)
E__S
термопара ТПП (S)
E__t
термопара ТМК (Т)
i0_5
сигнал тока 0...5 мА
i0.20
сигнал тока 0...20 мА
i4.20
сигнал тока 4...20 мА
U-50
сигнал напряжения -50...+50 мВ
U0_1
сигнал напряжения 0...1 В
DPT1, DPT2
Точность вывода
0, 1
Количество знаков после запятой при
1
(DPT1, DPT2)
температуры для
отображении значения температуры
Входа 1, для Входа 2
на ЦИ для Входа 1, для Входа 2
dP1, dP2
Положение десятичной
0, 1, 2, 3
Количество знаков после запятой при
1
(dP1, dP2)
точки для Входа 1, для
отображении значения для
Входа 2
аналогового Входа 1, Входа 2
in.L1, in.L2
Нижняя граница
-1999...9999
Значение измеряемой физической
0.0
(in.L1, in.L2)
диапазона измерения
величины, соответствующее нижнему
для Входа 1*, для
пределу выходного сигнала датчика
Входа 2**
in.H1, in.H2
Верхняя граница
-1999...9999
Значение измеряемой физической
100.0
(in.H1, in.H2)
диапазона измерения
величины, соответствующее верхней
для Входа 1*, для
границе диапазона измерения датчика
Входа 2**
SQR1, SQR2
Вычислитель
OFF
Выключен
OFF
(SQR1, SQR2)
квадратного корня на
ON
Включен
Входе 1, на Входе 2
111
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
SH1, SH2
Сдвиг характеристики
-500...+500
[ед. изм.] Прибавляется к
0.0
(SH1, SH2)
датчика для Входа 1*,
измеренному значению
для Входа 2**
KU1, KU2
Наклон характеристики
0,500...2,000
Умножается на измеренное значение
1.000
(KU1, KU2)
датчика для Входа 1,
для Входа 2
Fb1, Fb2
Полоса цифрового
0...9999
[ед. изм.]
0.0
(Fb1, Fb2)
фильтра для Входа 1*,
для Входа 2**
inF1, inF2
Постоянная времени
1...999
[c]
OFF
(inF1, inF1)
цифрового фильтра для
OFF
Экспоненциальный фильтр отключен
Входа 1, для Входа 2
Группа AdV (AdV). Параметры регулирования и «LBA»
inP2
Функция на Входе 2
Появляется при r-S = StOP
OFF
(inP2)
OFF - датчик отключен;
In.t2 - датчик, заданный в параметре in.t2;
EVnt - ключ;
V.Ptr - резистивный датчик положения;
V.CS - токовый датчик положения
CALC
Формула вычислителя
Появляется при inP2 = in.t2
A.SUM
(CALC)
A.SUM - средневзвешенная сумма;
rAt - отношение;
SQPV - корень из средневзвешенной суммы;
GrAF - коррекция уставки
KPV1, KPV2
Весовой коэффициент
-19,99…99,99
Появляется при inP2 = in.t2, CALC ≠
1.00
(KPV1, KPV2)
для PV1, для PV2
GrAF. При CALC = rAt не устанавливать
KPV2 = 0
112
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
SL-L
Нижняя граница
-1999…3000
[ед. изм.]
-199,9
(SL-L)
диапазона задания
уставки*
SL-H
Верхняя граница
-1999…3000
[ед. изм.]
3000
(SL-H)
диапазона задания
уставки*
MVEr
Выходной сигнал в
CLOS - задвижка полностью закрыта;
CLOS
(MVEr)
состоянии «ошибка»
HOLd - задвижка удерживается в прежнем состоянии;
OPEn - задвижка полностью открыта
0…100
[%] Для аналоговой задвижки
0
MdSt
Состояние выхода в
Появляется только для прибора с ВУ1 аналогового типа:
MVSt
(MdSt)
состоянии «остановка
MVSt - заданное параметром MVST;
регулирования»
O - последнее значение выходного сигнала.
OREU
Тип управления при
Or-r
«Обратное» управление.
Or-r
(OREU)
регулировании
Применяется для управления ИМ типа
«нагреватель»
Or-d
«Прямое» управление. Применяется
для управления ИМ типа
«холодильник»
PV0
Регулируемая величина
-100…2000
[ед. изм.]
20
(PV0)
при нулевой выходной
мощности
RAMP
Режим быстрого выхода
OFF
Выключен
OFF
(RAMP)
на уставку
ON
Включен
113
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
P
Полоса
0,001...9999
[ед. изм.]
30.0
(P)
пропорциональности
ПИД-регулятора*
I
Интегральная
0...3999
[c]
100
(I)
постоянная ПИД-
регулятора
D
Дифференциальная
0...3999
[c]
20
(D)
постоянная ПИД-
регулятора
Db
Параметр не
0...200
[ед. изм.]
0.0
(Db)
используется, для
корректной работы
должен быть
установлен 0.0
VSP
Скорость изменения
0...9999
[ед.изм/мин]
0.0
(VSP)
уставки*
OL-L
Минимальная выходная
от 0 до OL-H
[%]
0
(OL-L)
мощность (нижний
предел)
OL-H
Максимальная
от OL-L до 100
[%]
100
(OL-H)
выходная мощность
(верхний предел)
ALt
Тип логики работы
0 - сигнализация выключена;
0
(ALt)
компаратора.
1 - срабатывание при выходе за пределы заданного
Появляется только для
диапазона относительно SP;
прибора с ВУ1
2 - срабатывание по верхнему пределу относительно SP;
аналогового типа.
3-срабатываниепонижнемупределу относительноSP;
114

Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
4 - срабатывание в заданном диапазоне относительно SP;
5 - аналогично типу 1 с блокировкой первого включения;
6 - аналогично типу 2 с блокировкой первого включения;
7 - аналогично типу 3 с блокировкой первого включения;
8 - срабатывание по верхнему пределу относительно 0;
9 - срабатывание по нижнему пределу относительно 0;
10 - аналогично типу 8 с блокировкой первого включения;
11 - аналогично типу 9 с блокировкой первого включения;
12 - срабатывание при выходе за пределы заданного
диапазона относительно 0;
13 - срабатывание в заданном диапазоне относительно 0;
14 - аналогично типу 12 с блокировкой первого включения
MVSt
Выходной сигнал в
Аналогично параметру MVEr
—
(MVSt)
состоянии «остановка
регулирования»
LbA
Время диагностики
0…9999
[с]
0
(LbA)
обрыва контура
0
Функция определения обрыва контура
не работает
LbAb
Ширина зоны
0…9999
[ед. изм.]
10.0
(LbAb)
диагностики обрыва
контура*
AL-d
Порог срабатывания
-1999…3000
[ед. изм.]
10.0
(AL-d)
компаратора*
AL-H
Гистерезис
0…3000
[ед. изм.]
0.0
(AL-H)
компаратора*
115
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
Группа VALV (VALV). Параметры задвижки
V.MOt
Полное время хода
5…999
[c]
30
(V.MOt)
задвижки
V.db
Зона
0…9999
[мс]
0
(V.db)
нечувствительности
0…100
[%] Для аналоговой задвижки
задвижки
V.GAP
Время выборки люфта
0,0…10,0
[с]
0.0
(V.GAP)
задвижки
V.rEV
Минимальное время
0,0…10,0
[с]
0.0
(V.rEV)
реверса
V.toF
Пауза между
0…9
[с]
2
(V.toF)
импульсами доводки
OFF
доводчик отключен
Группа DISP (DISP). Параметры индикации
diS1
Режим индикации 1
OFF
Выключен
On
(diS1)
On
Включен:
- на верхнем ЦИ - PV1;
– на нижнем ЦИ - SP
diS2
Режим индикации 2
OFF
Выключен
OFF
(diS2)
On
Включен:
- на верхнем ЦИ - PV1;
– на нижнем ЦИ - PV2
diS3
Режим индикации 3
OFF
Выключен
OFF
(diS3)
On
Включен:
- на верхнем ЦИ - LUPV;
– на нижнем ЦИ - SP
116
Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
diS4
Режим индикации 4
OFF
Выключен
OFF
(diS4)
On
Включен:
- на верхнем ЦИ - PV1;
– на нижнем ЦИ - O
diS5
Режим индикации 5
OFF
Выключен
OFF
(diS5)
On
Включен:
- на верхнем ЦИ - LUPV;
– на нижнем ЦИ - O
rEt
Время выхода из
5…99 - [c] время, по истечении которого прибор
OFF
(rEt)
режима настройки
возвращается к индикации первого параметра группы LVOP.
OFF - автоматического возврата к индикации не
происходит
Группа GrAF (GrAF). Параметры графика коррекции уставки (появляется при CALC = GrAF)
nOdE
Количество узловых
1…10
1
(nOdE)
точек графика
X
Значение внешнего
-1999…3000
[ед. изм.]
0.0
(X)
параметра в точке i*
Y
Корректирующее
[ед. изм.]
0.0
(Y)
значение уставки
в точке i*
Группа COMM (COMM) Параметры обмена данными по интерфейсу
PROT
Протокол обмена
OWEN
OWEN
OWEN
(PROT)
данными
M.RTU
Modbus RTU
M.ASC
Modbus ASCII
117

Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
bPS
Скорость обмена в сети
2,4; 4,8; 9,6;
[кбит/с]
115.2
(bPS)
14,4;19,2; 28,8;
38,4; 57,6; 115,2
A.LEN
Длина сетевого адреса
8, 11
[бит]
8b
(A.LEN)
Addr
Базовый адрес прибора
0…2047
Запрещается устанавливать
0
(Addr)
в сети
одинаковые номера нескольким
приборам в одной шине
rSdL
Задержка ответа от
0…45
[мс]
20
(rSdL)
прибора по RS-485
Группа SECr (SECr). Параметры секретности (вход по коду PASS = 100)
OAPt
Защита параметров от
0 - Разрешен доступ ко всем параметрам;
0
(OAPt)
просмотра***
1 - Разрешен доступ только к параметрам группы LVOP;
2 - Разрешен доступ только к SP
WtPt
Защита параметров от
0 - Разрешено изменение всех параметров;
0
(WtPt)
изменения***
1 - Запрещено изменение всех параметров, кроме
параметров группы LVOP;
2 - Запрещено изменение всех параметров, кроме R-S и SP;
3 - Запрещено изменение всех параметров, кроме уставки
SP;
4-Запрещеноизменениевсехпараметров
118

Продолжение таблицы А.1
Параметр
Допустимые
Заводская
Комментарии
значения
установка
Обозначение
Наименование
EdPt
Защита отдельных
OFF
Выключена
OFF
(EdPt)
параметров от
On
Включена
просмотра и изменения
ПРИМЕЧАНИЕ
* Параметры отображаются с десятичной точкой, положение которой определяется параметром DP1.
** Параметры отображаются с десятичной точкой, положение которой определяется параметром DP2.
*** По интерфейсу RS-485 возможно изменение значения всех параметров при любых значениях OAPt, WtPt.
119

Приложение Б. Возможные неисправности и способы их
устранения
В случае возникновения неисправности во время работы прибора на цифровой индикатор выводится
соответствующее сообщение:
• Err.S - ошибка на входе;
• Err.P - ошибка датчика положения;
• Err.C - ошибка вычисления;
• Er.AD - ошибка внутреннего преобразования.
ПРЕДУПРЕЖДЕНИЕ
1. Ошибка на входе возникает в случае выхода измеряемой величины за допустимый диапазон
измерения или выхода из строя датчика (обрыв или короткое замыкание ТС, обрыв ТП, обрыв
датчика с унифицированным выходным сигналом напряжения, обрыв или короткое замыкание
датчика, оснащенного выходным сигналом тока 4…20 мА). В случае короткого замыкания
термопары на индикаторе отображается температура «холодного спая», равная температуре
выходного разъема прибора. В случае обрыва или замыкания датчика (или линий связи) с
унифицированным выходным сигналом тока 0...5 мА, 0...20 мА, замыкания датчика с
унифицированным сигналом напряжения 0…1 В на индикаторе отображается нижняя граница
диапазона измерения (значение параметра in-L).
После устранения неисправности работа прибора автоматически восстанавливается.
2. В случае работы с термопарой ТПР(В) сообщение Err.S не выдается при температуре от 0
до 200 °С.
Таблица Б.1 - Возможные неисправности и способы их устранения
Неисправность
Возможная причина
Способ устранения
На индикаторе при
Неисправность датчика
Замена датчика.
подключенном
Обрыв или короткое замыкание линии связи
Устранение причины неисправности.
датчике
«датчик-прибор»
отображаются Err.5
120
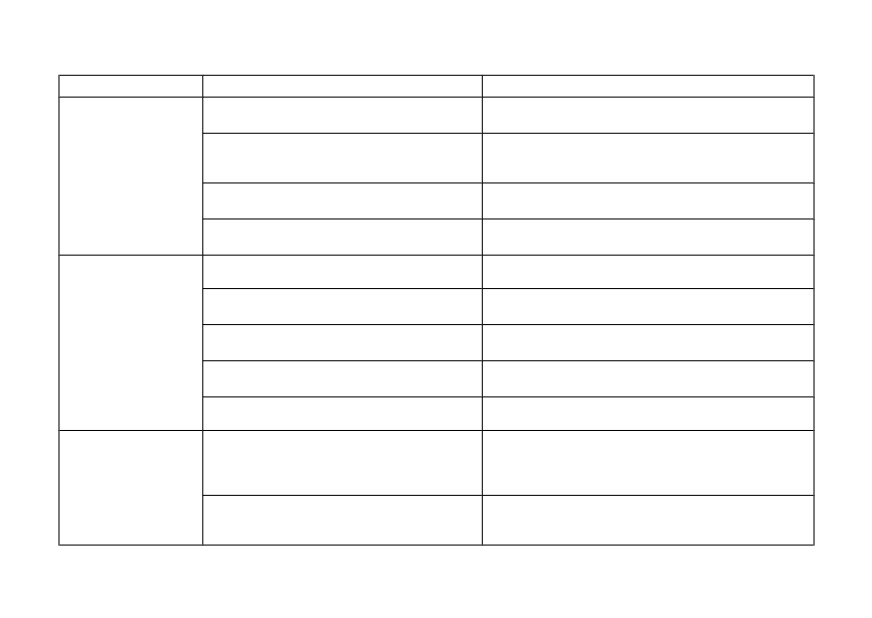
Продолжение таблицы Б.1
Неисправность
Возможная причина
Способ устранения
Неверный код типа датчика
Установить код, соответствующий используемому
датчику.
Неверно произведено подключение по
Установить перемычку между клеммами 9, 10 (для
двухпроводной схеме соединения прибора с
Н2 15-16) для Входа 1 и 13, 14 (для Н2 11-12) для
датчиком
Входа 2.
Неверное подключение датчика к прибору
Проверить по руководству по эксплуатации схему
подключения прибора и датчиков.
При подключении токового сигнала
Подключить к входу прибора нагрузочный резистор.
отсутствует резистор
При подключенном
Неисправность датчика положения
Заменить датчик или отключить его в параметре
датчике положения на
inP2.
нижнем цифровом
Обрыв или короткое замыкание линии связи
Устранить причины неисправности.
индикаторе
«датчик-прибор»
отображается Err.P
Неверный тип датчика положения
Установить значение, соответствующее
используемому датчику, в параметре inP2.
Неверное подключение датчика положения
Проверить по РЭ схему подключения прибора и
к прибору
датчиков положения.
Не выполнена юстировка датчика
Провести юстировку.
положения
При подключенном
При регулировании отношения в
Установить в параметре KPV1 значение отличное от
датчике на верхнем
знаменателе - 0
0;
цифровом
Проверить Вход 2 (короткое замыкание или
индикаторе
измеренная величина равна 0)
отображается Err.C
При регулировании квадратичных величин
Проверить по РЭ схему подключения прибора и
подкоренное число - отрицательное
датчиков, в особенности полярность подключения;
Поменять местами датчики на входах
121
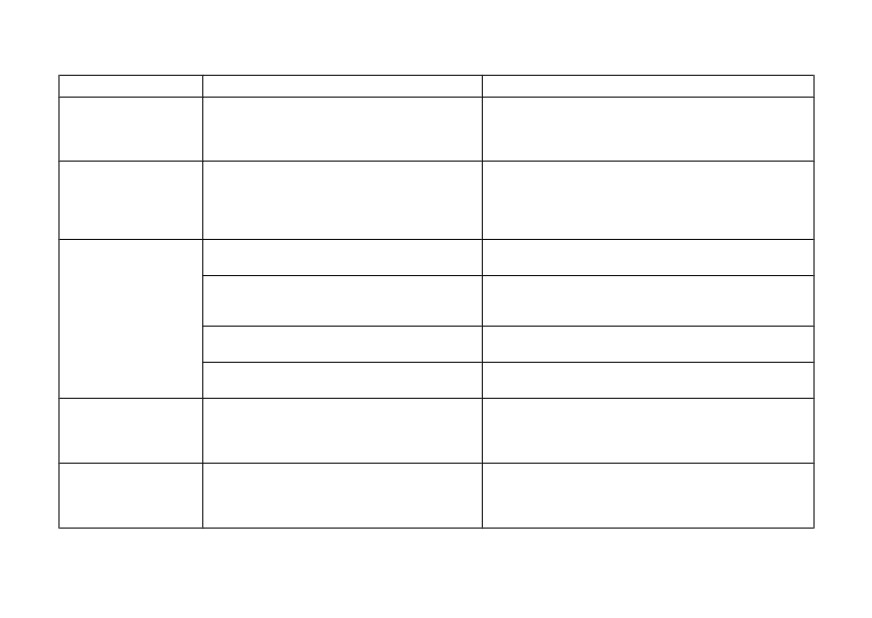
Продолжение таблицы Б.1
Неисправность
Возможная причина
Способ устранения
На цифровом
Измеренная или вычисленная величина
Установить в параметре dPt1 (dPt2)* значение 0
индикаторе
превышает значение 999,9 и не может быть
отображается ))))
отображена на цифровом индикаторе с
точностью 0,1 °С
На цифровом
Измеренная величина или вычисленная
Установить в параметре dPt1 (dPt2)* значение 0
индикаторе
величина меньше значения -199,9 и не
отображается [[[[
может быть отображена на
четырехразрядном цифровом индикаторе с
точностью 0,1°С
Значение
Неверный код типа датчика
Установить код, соответствующий используемому
измеряемой
датчику
температуры на
Введено неверное значение параметров
Установить необходимые значения параметров SH1 (
индикаторе не
«сдвиг характеристик» и «наклон
SH2)* , KU1 (KU2)*. Если коррекция не нужна,
соответствует
характеристики»
установить 0.0 и 1.000, соответственно
реальной
Используется двухпроводная схема
Воспользоваться рекомендациями к подключению
соединения прибора с датчиком
датчика ТС по двухпроводной схеме
Действие электромагнитных помех
Экранировать линию связи датчика с прибором,
экран заземлить в одной точке.
На индикаторе при
Неверное подключение датчика к прибору
Уточнить схему подключения датчика.
наличии токового
сигнала
отображаются нули
При нагреве темпера
Неверное соединение прибора с ТП
Изменить полярность подключения ТП.
тура уменьшается и
при охлаждении
увеличивается
122
Продолжение таблицы Б.1
Неисправность
Возможная причина
Способ устранения
Не работает
Неправильно задан порог и гистерезис
Установить верные значения параметров RL-d и RL-H.
выходное устройство
компаратора
компаратора
Остановлен процесс регулирования
Задать параметру r-S значение rUn.
(электромагнитное
реле)
Не происходит
Введено неоправданно большое значение
Установить параметр «зона нечувствительности» на
точного поддержания
зоны нечувствительности ПИД-регулятора
требуемом уровне (рекомендованное значение от 0
температуры
до 1 °С).
(недогрев или
Установлены неверные значения
Воспользоваться режимом автонастройки или
перегрев)
коэффициентов ПИД-регулятора
ручной настройкой.
Установлены неверные значения
Установить параметры задвижки как можно точнее,
параметров задвижки
по возможности взять их из технического описания
исполнительного механизма.
ПИД-регулятор
Установлено слишком малое время
Увеличить время диагностики или отключить его,
останавливается,
диагностики обрыва контура в параметре
установив LBA = 0
светится LBA
LBA
Невозможно
Установлена защита от просмотра и
Установить нужное значение параметров
изменить параметры
изменения отдельных параметров
секретности.
настройки
ПРЕДУПРЕЖДЕНИЕ
* В скобках приведены параметры для Входа 2
ПРЕДУПРЕЖДЕНИЕ
Если неисправность или предположительная причина в таблице не указаны, прибор следует
доставить в ремонт.
123
тел.: +7 (495) 641-11-56, факс: +7 (495) 728-41-45
отдел продаж: sales@owen.ru
рег.: 1-RU-20892-1.9