ЦИФРОВЫЕ ТЕНЗОДАТЧИКИ ZET 7010, ZET 7110, ZET 7111 РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ ЭТМС.421425.001-10 РЭ
ООО «ЭТМС»
Оглавление
-
Конфигурирование цифровых датчиков 9
-
Назначение и состав вкладок для конфигурирования измерительной части цифровых датчиков 10
-
Общие сведения о конфигурировании цифровых датчиков ZET 7х10 и ZET 7111 21
-
Конфигурирование цифровых датчиков серии ZET 7х10 и ZET 7111 при подключении внешних первичных преобразователей (датчиков) 22
-
Конфигурирование цифровых датчиков серии ZET 7х10 и ZET 7111 при подключении тензорезисторов 23
Приложение А Формирование тензометрических мостовых схем 25
Приложение Б Методики измерений с использованием тензорезисторов 28
Приложение В Примеры конфигурирования 31
-
Назначение и технические характеристики
-
Назначение цифровых датчиков
Цифровые датчики серии ZET 7х10 или ZET 7111 предназначены для измерения относительной деформации, силы, веса, напряженности, крутящего момента и т.д. Цифровые датчики требуют наличия внешних первичных преобразователей (ПП), выполненных на базе тензорезисторов. Это могут быть либо внешние датчики (датчик силы растяжения/сжатия балочного/консольного/кромочного типа, S-образный тензодатчик и др.), либо отдельные тензорезисторы, подключаемые по полумостовой либо мостовой схеме. Первичный преобразователь устанавливается на объекте измерений и подключается к цифровому датчику, который осуществляет преобразование сигнала с первичного преобразователя в значения силы, напряжения, давления и пр.
-
Условия эксплуатации
Цифровые датчики серии ZET 7х10 или ZET 7111 в зависимости от назначения и места эксплуатации имеют два варианта исполнения:
-
Лабораторное исполнение – применяется при возможности использовать цифровые датчики в мягких условиях эксплуатации.
-
Промышленное исполнение – цифровые датчики предназначены для эксплуатации в жестких условиях, что позволяет применять их в неблагоприятных условиях окружающей среды, выдерживая большие механические нагрузки и вибрации. Цифровые датчики, в промышленном исполнении, допускаются к применению во взрывоопасных зонах. Имеют маркировку на боковой поверхности корпуса 0ExiaIICT6X.
Цифровые датчики, в промышленном исполнении, допускаются к применению во
 взрывоопасных
зонах в соответствии с установленной маркировкой
взрывоопасных
зонах в соответствии с установленной маркировкойвзрывозащиты 0ExiaIICT6 X.
Условия эксплуатации цифровых датчиков представлены в Табл. 1.1.
Табл. 1.1 Условия эксплуатации
Параметр
Значение
Лабораторное исполнение
Промышленное исполнение
Температура окружающего воздуха, ºС
5…40
-60…80
Относительная влажность воздуха, %
Не более 901
Не более 982
Атмосферное давление, мм. рт. ст.
630-800
495-800

1 при температуре воздуха 25 ºС без конденсации влаги.
2 при температуре воздуха 35 ºС.
-
-
Технические характеристики
Основные технические характеристики цифровых датчиков представлены в Табл. 1.2.
Табл. 1.2 Технические характеристики
Параметр
Значение
ZET 7010
ZET 7110
ZET 7111
Диапазон напряжения питания, В
9…24
Потребляемая мощность, Вт
0,25
Тип подключаемых ПП
Датчики силы, мостовые или полумостовые тензодатчики (тензорезисторы)
Диапазон измерений электрических напряжений от подключаемых ПП, мВ/В
-6…6
-6…6
-7…7
Порог чувствительности, мВ/В
0,0001
Частота обновления данных, Гц
1
1
5
25
125
50
250
625
1250
Напряжение питания ПП, В
4,2
4,2
33
Ток питания ПП, мА
25
25
10
Интерфейс передачи данных
RS-485
CAN 2.0
CAN 2.0
Протокол обмена
MODBUS

3 амплитудное значение напряжения питания первичного преобразователя от источника переменного тока.
-
-
Внешний вид и назначение разъемов
-
Внешний вид цифровых датчиков
На Рис. 2.1 представлен внешний вид цифрового датчика ZET 7010, выполненного в лабораторном исполнении. Внутри цифрового датчика, на нижней грани, расположен магнит, что позволяет, при необходимости, установить датчик на металлической поверхности в удобном для пользователя положении.

Рис. 2.1 Внешний вид цифрового датчика в лабораторном исполнении
На Рис. 2.2 представлен внешний вид цифрового датчика ZET 7010, выполненного в промышленном исполнении. Цифровой датчик крепится на объекте измерений по двум точкам,
через отверстие ⌀6,2 мм на одной стороне датчика и паз шириной 6,2 мм на другой стороне
датчика, позволяющий производить крепление цифрового датчика с базовым расстоянием
125±5 мм. При установке цифровых датчиков на бетонные поверхности следует использовать анкерные шпильки, либо анкера с внутренней резьбой М6. Установку на металлические поверхности производить на приварные шпильки М6, либо болтами М6 к крепежным отверстиям.

Рис. 2.2 Внешний вид цифрового датчика в промышленном исполнении
Цифровые датчики, в промышленном исполнении, допускаются к применению во
 взрывоопасных
зонах в соответствии с установленной маркировкой
взрывоопасных
зонах в соответствии с установленной маркировкойвзрывозащиты 0ExiaIICT6 X.
-
Обозначение контактов цифровых датчиков
-
Цифровые датчики серии ZET 7х10 или ZET 7111, выполненные в лабораторном исполнении, имеют две группы клемм. Группа из 4-х клемм предназначена для подключения цифровых датчиков к измерительной сети, а группа из 6-и клемм предназначена для подключения первичного преобразователя.
На Рис. 2.3 отображено обозначение контактов цифрового датчика ZET 7010, выполненного в лабораторном исполнении.

Рис. 2.3 Обозначение контактов ZET 7010 в лабораторном исполнении
На Рис. 2.4 отображено обозначение контактов цифровых датчиков ZET 7110, ZET 7111, выполненных в лабораторном исполнении.
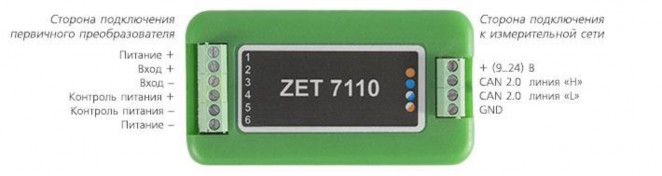
Рис. 2.4 Обозначении контактов ZET 7110, ZET 7111 в лабораторном исполнении
Цифровые датчики серии ZET 7х10 или ZET711, выполненные в промышленном исполнении, имеют два 4-контактных разъёма FQ14-4ZK-S для подключения к измерительной сети и один 7–контактный разъем FQ14-7ZK-S для подключения первичного преобразователя.
На Рис. 2.5 отображено обозначение контактов разъема FQ14-4ZK-S, предназначенного для подключения цифровых датчиков к измерительной сети.

Разъем датчика Ответный разъем

Номер контакта
Подключение к измерительной сети
ZET 7010
ZET 7110, ZET 7111
1
9…24 В
2
RS-485 линия B или «DATA-»
CAN 2.0 линия «H»
3
RS-485 линия A или «DATA+»
CAN 2.0 линия «L»
4
GND
Рис. 2.5 Обозначение контактов разъема для подключения измерительной сети
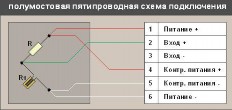
На Рис. 2.6 отображено обозначение контактов разъема FQ14-7ZK-S, предназначенного для подключения первичного преобразователя.
Разъем датчика Ответный разъем


Номер контакта
Подключение первичных преобразователей
1
Питание +
2
Вход +
3
Вход -
4
Контроль питания +
5
Контроль питания -
6
Питание -
7
Не задействован
-
-
-
Подготовка к конфигурированию
-
Подключение цифровых датчиков
Перед началом работы с цифровыми датчиками их следует подключить к компьютеру с использованием преобразователей интерфейсов см. Табл. 3.1.
Примечание: необходимо чтобы преобразователи интерфейсов были сконфигурированы в режимы, обеспечивающие работу с модулями (см. «Руководство по конфигурированию ZET7070», «Руководство по конфигурированию ZET7076»).
Табл. 3.1 Подключение к преобразователям интерфейса
Тип цифрового датчика
Преобразователь интерфейса
Порт на компьютере
ZET 7010
ZET7070
USB 2.0
ZET7076
Ethernet
ZET 7110
ZET 7111
ZET7174
USB 2.0
ZET7176
Ethernet
На компьютере, при помощи которого будет производиться конфигурирование цифровых датчиков, должна быть установлена операционная система Windows, а также установлено и запущено программное обеспечение ZETLAB.
-
Программа «Диспетчер устройств»

В левой части окна располагается дерево иерархии устройств, подключенных к ПК. Верхний уровень иерархии составляют преобразователи интерфейса и устройства, подключаемые непосредственно к ПК. Во втором уровне иерархии отображаются цифровые датчики, подключенные к выбранному преобразователю интерфейса.
Если выбран режим подробного отображения, то в правой части окна отображаются основные параметры измерительных каналов в виде таблицы.
Выбор цифрового датчика, подлежащего конфигурированию, осуществляется двойным кликом левой кнопкой мыши по его наименованию. (Для более подробного ознакомления см.
«Программное обеспечение ZETLAB. Руководство пользователя»).
-
-
Конфигурирование цифровых датчиков
Вниман ие! Производитель оставляет за собой право на изменение версии программного обеспечения цифрового датчика. Порядок обновления цифрового датчика до текущей версии программного обеспечения описан в документе «РО_Сервисная работа с ZET7ххх.pdf», расположенном по директории https://file.zetlab.com/Document/.
-
Конфигурирование интерфейсной части цифровых датчиков
Конфигурирование интерфейсной части проводится в соответствии с методикой, приведенной в документе «Конфигурирование интерфейсной части цифровых датчиков серии ZET7ххх».
Следует обратить особое внимание, что во вкладках «Информация» в поле «Адрес (node) от 2 до 63», каждого цифрового датчика, должен устанавливаться уникальный адрес устройства в измерительной цепи. Обязательным условием исправной работы измерительной цепи является наличие разных адресов у всех устройств, входящих в состав данной цепи. Адреса устройств следует устанавливать в диапазоне от 3 до 63.
-
Назначение и состав вкладок для конфигурирования измерительной части цифровых датчиков
-
. Вкладка «Измерения»
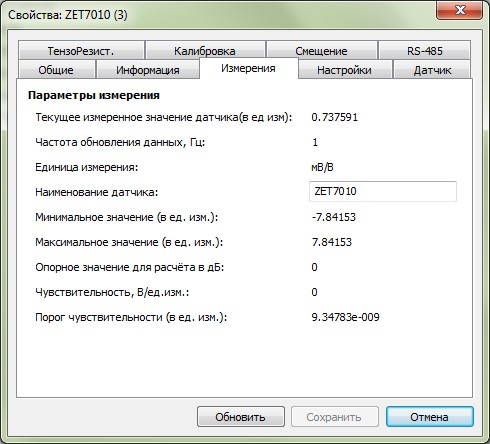
Вкладка «Измерения» содержит информацию о параметрах, приведенных в Табл. 4.1.
Табл. 4.1 Параметры вкладки «Измерения»
Параметр
Возможность изменения
Допустимые значения
Описание
Текущее измеренное значение датчика
(в ед. изм.)
−
В пределах диапазона измерений
Отображает измеренное значение на канале, зафиксированное на момент открытия вкладки.
Частота обновления данных, Гц
−
−
Соответствует текущей частоте обновления данных.
Единица измерения
−
−
Соответствует текущей единице измерений, заданной для параметра
«Единица измерений», вкладки
«Настройки».
Наименование датчика
Да
Любая последовательн ость символов (не более 32)
Назначается произвольно.
Минимальное значение
(в ед. изм.)
−
−
В ячейке отображается минимально возможное значение, которое может быть измерено цифровым датчиком.
Максимальное значение
(в ед. изм.)
−
−
В ячейке отображается максимально возможное значение, которое может быть измерено цифровым датчиком.
Опорное значение для расчета в дБ
−
−
Отображается опорное значение необходимое для пересчета измеренного значения в дБ (для цифровых датчиков серии ZET7x10, ZET 7111 параметр не актуален).
Чувстви- тельность (в ед. изм.)
−
−
Отображается значение чувствительности.
Порог чувстви- тельности
(в ед. изм.)
−
−
Параметр указывает на точность измерений.
На Рис. 4.1 приведен пример вкладки «Измерения».
-
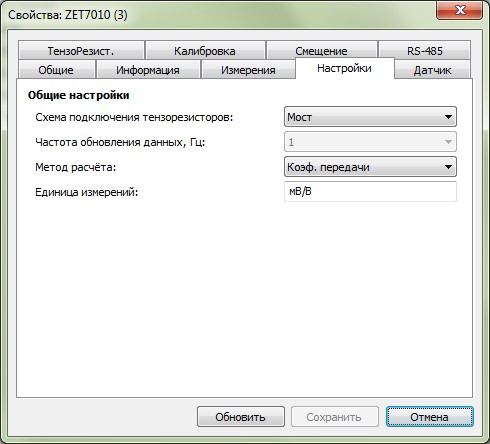
. Вкладка «Настройки»
Вкладка «Настройки» содержит информацию о параметрах, приведенных в Табл. 4.2.
Табл. 4.2 Параметры вкладки «Настройки»
Параметр
Возможность изменения
Допустимые значения
Описание
Схема подключения тензо- резисторов
Да
Мост Полумост
Для цифровых датчиков ZET 7x10 и ZET 7111 устанавливать значение в зависимости от варианта схемы подключения внешнего первичного преобразователя.
Частота обновления данных, Гц
−
1
Частота дискретизации для цифровых датчиков ZET 7010.
Да
1
5
25
125
Частота дискретизации для цифровых датчиков ZET 7110.
Да
50
250
625
1250
Частота дискретизации для цифровых датчиков ZET 7111.
Метод расчета
Да
Коэф. передачи
Калибровочная кривая
Параметр «Коэффициент передачи» задается в случае если известна линейная характеристика первичного преобразователя, используемого совместно с цифровым датчиком.
Параметр «Калибровочная кривая» задается в случае если линейная характеристика первичного преобразователя не известна, но существует возможность произвести его тарировку по точкам для требуемого диапазона измерений.
Единица измерений
Да
мВ/В Н
кг т
Н/м кН/м МПа ГПа и др.
Указываемые единицы измерений для идентификации физических единиц в которых производится измерение.
Не используется цифровым датчиком ни для каких преобразований, однако следует помнить о том, что при расчете Sr следует использовать значения параметров в соответствующих единицах измерения.
На Рис. 4.2 приведен пример вкладки «Настройки».
-
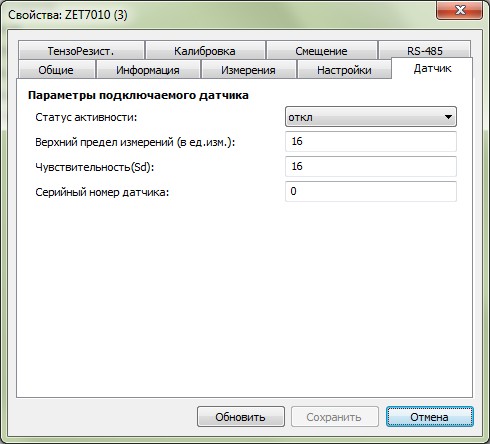
. Вкладка «Датчик»
Вкладка «Датчик» содержит информацию о параметрах, приведенных в Табл. 4.3.
Табл. 4.3 Параметры вкладки «Датчик»
Параметр
Возможность изменения
Допустимые значения
Описание
Статус активности
Да
откл вкл
В случае, когда к цифровым датчикам моделей ZET 7х10 или ZET 7111 подключается внешний первичный преобразователь (датчик) следует выбрать параметр «вкл».
Верхний предел измерений (в ед. изм.)
Да
−
Параметр определяет максимальный диапазон измерения первичного преобразователя (датчика).
Параметр указывается в паспорте на первичный преобразователь (датчик).
Чувстви- тельность (Sd)
Да
−
Параметр определяет чувствительность внешнего первичного преобразователя (датчика).
Параметр указывается в паспорте на первичный преобразователь (датчик).
Серийный номер датчика
Да
−
Параметр устанавливается только при необходимости идентификации серийного номера первичного преобразователя, подключенного к цифровым датчикам серии ZET7x10 и ZET 7111.
На Рис. 4.3 приведен пример вкладки «Датчик».
4.2.4. Вкладка «Тензорезистор»
Вкладка «Тензорезистор» содержит информацию о параметрах, приведенных в Табл. 4.4.
Табл. 4.4 Параметры вкладки «Тензорезистор»
Параметр
Возможность изменения
Допустимые значения
Описание
Статус активности
Да
откл вкл
В случае, когда к цифровым датчикам серии ZET 7х10 или ZET 7111 подключаются тензорезисторы следует выбрать параметр «вкл».
Чувстви- тельность (Sr)
Да
Зависит от схемы и выбранных единиц измерения
Параметр определяет чувствительность цифрового датчика с учетом используемой схемы и единицы измерения.
Указываемое для данного параметра значение Sr рассчитывается по формуле. (см. приложения Б и В).
На Рис. 4.4 приведен пример вкладки «Тензорезистор».
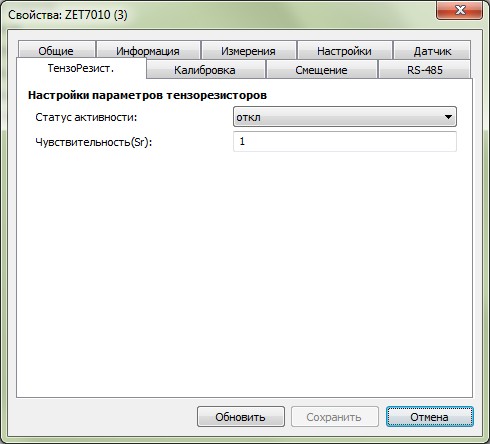
Рис. 4.4 Вкладка «Тензорезистор»
-
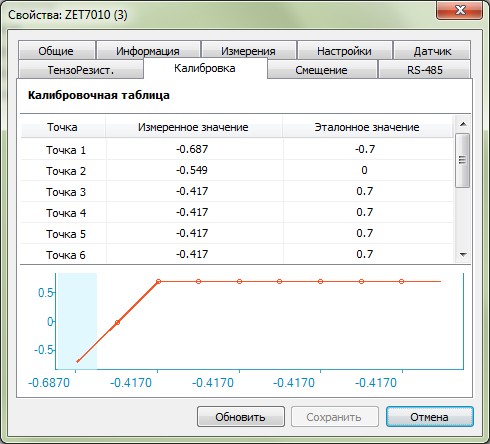
Пример вкладки «Калибровка» приведен на Рис. 4.5.
Внимание: Перед внесением показаний в калибровочную таблицу необходимо:
-
во вкладке «Датчик» установить следующие параметры:
-
Статус активности – «откл».
-
-
во вкладке «Тензорезистор» установить следующие параметры:
-
Статус активности – «откл».
-
-
во вкладке «Настройки» установить следующие параметры:
-
Метод расчёта – «Коэффициент передачи».
-
-
во вкладке «Смещение» установить следующие параметры:
-
Состояние смещения – «откл».
Вкладка «Калибровка» содержит 10 точек для калибровки цифрового датчика в диапазоне измерения.
Калибровку необходимо проводить только для случаев, когда характеристика цифрового датчика, оснащенного внешним первичным преобразователем не известна, но при этом существует возможность обеспечить воздействие на него с известной величиной по нагрузке (либо по перемещению) во всем диапазоне измерения.
На Рис. 4.5 приведен пример калибровки по трем точкам цифрового датчика модели ZET 7110 DT для работы в диапазоне ±0.7 мм. Для калибровки цифровой датчик был зафиксирован на установочных винтах с резьбой М4.
По индикатору программы «Вольтметр постоянного тока», которая располагается в меню «Измерение» на панели программы ZETLAB определяются измеренные значения для каждой из трех точек степени сжатия цифрового датчика ZET 7110 DT.
Эталонное значение 0.7 мм (точка 3 в калибровочной таблице) соответствует минимальной степени сжатия чувствительного элемента цифрового датчика и равно началу реакции при сжатии цифрового датчика установочными винтами.
Эталонное значение 0 мм (точка 2 калибровочной таблицы) равно средней степени сжатия и определяется величиной задаваемой поворотом по часовой стрелке на 1 оборот установочного винта с шагом резьбы равным 0.7мм (0.7мм*1=0.7 мм).
Эталонное значение минус 0.7 мм (точка 1 калибровочной таблицы) равно максимальной степени сжатия и определяется величиной задаваемой поворотом по часовой стрелке на 2 оборота установочного винта.
Минимальное количество точек калибровки – 2 точки. Также, следует обратить внимание, что в случае, когда остаются не заполненными строки с измеренными и эталонными значениями, следует заполнить свободные строки калибровочной таблицы значениями из нижней строки калибровочной таблицы, заполненной точками с измеренным и эталонным значениями.
По окончанию калибровки необходимо активировать кнопку «Сохранить» см. Рис. 4.5.
После чего в параметре «Метод расчета» вкладки «Настройки» установить значение
«Калибровочная кривая», а в параметре «Единица измерений» прописать требуемое значение и сохранить изменения. В дальнейшем, при работе в режиме «Калибровочная кривая», параметр
«Статус активности» во вкладках «Тензорезистор» и «Датчик» должны находится в состоянии
«откл».
-
-
-
. Вкладка «Смещение»
Вкладка «Смещение» содержит информацию о параметрах, приведенных в Табл. 4.5.
Табл. 4.5 Параметры вкладки «Смещение»
Параметр
Возможность изменения
Допустимые значения
Описание
Состояние смещения
Да
откл вкл
Включение\отключения перерасчета текущего измеряемого значения к значению, указанному в параметре «Смещение в ед. изм.».
Смещение в ед. изм.
Да
−
Указывается значение, которое необходимо установить в качестве текущего показания цифрового датчика. В дальнейшем относительно заданного значения будут отслеживаться изменения показаний.
На Рис. 4.6 приведен пример вкладки «Смещение».

Ниже приведено несколько примеров различных вариантов применения функции
«Смещение» при использовании цифровых датчиков.
Пример №1:
Известно, что элемент конструкции к моменту установки первичного преобразователя был подвержен напряжению 500 МПа. Для учета преднапряженного состояния элемента конструкции следует внести в поле «Смещение в ед. изм.» значение «500», а в поле «Состояние смещения» выбрать параметр «вкл.», после чего активировать кнопку «Сохранить». Цифровой датчик начнет фиксировать изменения напряжения контролируемого элемента конструкции с учетом преднагруженного состояния - 500 МПа.
Пример №2:
После установки тензорезисторов контролируемый элемент конструкции находится в положении относительно которого необходимо начать измерение его деформации. Следует внести в поле «Смещение в ед. изм.» значение «0», в поле «Состояние смещения» выбрать
«вкл.», после чего активировать кнопку «Сохранить». Цифровой датчик начнет регистрировать деформацию элемента конструкции относительно установленного нулевого значения.
-
-
Общие сведения о конфигурировании цифровых датчиков ZET 7х10 и ZET 7111
Цифровые датчики серии ZET 7х10 или ZET 7111 требуют наличия внешних первичных преобразователей, выполненных на базе тензорезисторов. Это могут быть либо внешние датчики, либо отдельные тензорезисторы, подключаемые по полумостовой либо мостовой схеме (см. табл. «Формирование тензометрических мостовых схем» в Приложении А).
Обратите внимание на то что формулы для расчета чувствительности S, приведенные в Приложении А, указываются для единиц измерения мм/м в том числе и для схем измерения момента на валу. Для преобразования деформации (регистрируемой тензорезисторами на поверхности вала) к требуемым единицам измерения, в том числе к единицам измерения крутящего момента, необходимо воспользоваться формулами для вычисления расчетной чувствительности Sr приведенными в Приложении Б.
При конфигурировании цифровых датчиков учитывайте, что единицы измерения и диапазон измерения определяется характеристиками подключенных первичных преобразователей (в случае использования внешних датчиков), либо выбранной схемой измерения (см. приложение А) и свойствами материала на который наклеиваются тензорезисторы.
Чтобы вносимые значения в параметры цифрового датчика при его конфигурировании вступили в силу, активируйте кнопку «Сохранить» в каждой из вкладок цифрового датчика, в которую вы внесли изменения.
-
Конфигурирование цифровых датчиков серии ZET 7х10 и ZET 7111 при подключении внешних первичных преобразователей (датчиков)
Для случаев, когда к цифровым датчикам серии ZET 7х10 или ZET 7111 в качестве первичных преобразователей подключаются внешние первичные преобразователи (датчики) необходимо:
-
во вкладке «Датчик» настроить следующие параметры:
-
Статус активности – «вкл»;
-
Верхний предел измерений – параметр определяет максимальный диапазон измерения подключаемого датчика (параметр указывается в паспорте на подключаемый датчик);
-
Чувствительность (Sd) – параметр определяет чувствительность подключаемого датчика (параметр указывается в паспорте на подключаемый датчик).
-
-
во вкладке «Настройки» установить следующие параметры:
-
Схема подключения тензорезисторов – задать схему подключения тензорезисторов в соответствии с паспортными данными подключенного датчика;
-
Метод расчета – «Коэф. передачи»;
-
Единица измерений – задать единицы измерения в соответствии с паспортными данными подключенного датчика.
-
Вниман ие! Чтобы вносимые значения в параметры цифрового датчика при его конфигурировании вступили в силу, активируйте кнопку «Сохранить» в каждой из вкладок цифрового датчика, в которую вы внесли изменения.
-
-
Конфигурирование цифровых датчиков серии ZET 7х10 и ZET 7111 при подключении тензорезисторов
Для случаев, когда к цифровым датчикам серии ZET 7х10 или ZET 7111 подключаются тензорезисторы по мостовой, либо полумостовой схеме (см. Приложение А) необходимо:
-
во вкладке «Тензорезистор» настроить следующие параметры:
-
Статус активности – «вкл»;
-
Чувствительность (Sr) – расчетный коэффициент чувствительности, на который умножается регистрируемый электрический сигнал для получения требуемых единиц измерений (методика расчета коэффициента чувствительности приведена в приложении Б).
-
-
во вкладке «Настройки» установить следующие параметры:
-
Схема подключения тензорезисторов –задать схему подключения тензорезисторов в соответствии с выбранной схемы включения;
-
Метод расчета – «Коэф. передачи»;
-
Единица измерений – задать требуемые единицы измерения.
Вниман ие! Указываемые единицы измерений для идентификации физических единиц, в которых производится измерение, не используется цифровым датчиком ни для каких преобразований. Однако, следует помнить о том, что при расчете Sr необходимо использовать значения параметров в соответствующих единицах измерения.
При необходимости корректировки начального значения показаний цифрового датчика следует во вкладке «Смещение» настроить:
-
Смещение в ед. изм.– в параметре указывается значение, которое необходимо установить в качестве текущего показания цифрового датчика;
-
Состояние смещения – «вкл».
-
Вниман ие! Настройка каждого нового значения в поле «Смещение в» осуществляется только после деактивации значения установленного ранее, путем установки в поле
«Состояние смещения» параметра «откл».
-
-
-
Режимы работы светодиодной индикации
В Табл. 5.1 представлена информацию о режимах работы светодиодной индикации, расположенной на верхней панели корпуса цифрового датчика. В зависимости от совместных режимов работы синего и зеленого светодиодов существует возможность контролировать состояние устройства и диагностировать неисправности.
Табл. 5.1 Состояние светодиодной индикации
Состояние индикации
Выделение устройства или сохранение
Ошибка (нет связи или неисправный датчик)
Форма индикации в течении 2-х секунд
Описание работы светодиодной индикации
|
1 |
2 |
||||||
Синий – горит постоянно Зеленый – горит постоянно
|
1 |
2 |
||||||
Синий – горит постоянно
Зеленый – горит 500 мс за 1 секунду
Заводские настройки (адрес 2)
Скрытый протокол (только для RS- 485)
Штатный режим
|
1 |
2 |
||||||
Синий – горит постоянно
Зеленый – горит 100 мс за 2 секунды
|
1 |
2 |
||||||
Синий – горит 500 мс за 1 секунду Зеленый – горит 100 мс за 2 секунды
|
1 |
2 |
||||||
Синий – горит 100 мс за 2 секунды Зеленый – горит 100 мс за 2 секунды

Приложение А
Формирование тензометрических мостовых схем
№ Применение Состав и параметры Схема подключения
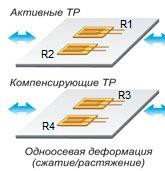
Одноосевая деформация
Тензорезистор – 1 шт. Сопротивление – 1 шт. Условие: R≈R1 Термокомпенсация – нет. Компенсация изгиба – нет
-
Конфигурирование
Настройки/Схема: Полумост Настройки/Метод: Коэф. передачи
Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/K
Тензорезистор – 2 шт. Сопротивление – 1 шт. Условие: R≈R1+R2 Термокомпенсация – нет Компенсация изгиба – есть
-
Конфигурирование
Настройки/Схема: Полумост Настройки/Метод: Коэф. передачи
Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/(2*K)
Тензорезистор – 2 шт. Условие: R2≈R1 Термокомпенсация – есть Компенсация изгиба – нет
-
Конфигурирование
Настройки/Схема: Полумост Настройки/Метод: Коэф. передачи
Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/K
Тензорезистор – 2 шт. Условие: R2≈R1 Термокомпенсация – есть Компенсация изгиба – нет
Конфигурирование
-
Настройки/Схема: Полумост Настройки/Метод: Коэф. передачи
Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/((1+ν)*K
)
ν – коэффициент Пуассона




5
Тензорезистор – 4 шт. Условие: R4≈R3≈R2≈R1 Термокомпенсация – есть Компенсация изгиба - есть
Конфигурирование Настройки/Схема: Мост Настройки/Метод: Коэф. передачи Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/((1+ν)*2* K)
6
Тензорезистор – 4 шт. Условие: R4≈R3≈R2≈R1 Термокомпенсация – есть Компенсация изгиба - нет
Конфигурирование Настройки/Схема: Мост Настройки/Метод: Коэф. передачи Тензорез./Статус: Вкл.
Тензорез./Чувствит.: S=4/(2*K)
Деформация изгиба
7
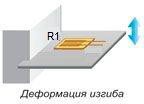
Тензорезистор – 1 шт. Сопротивление – 1 шт. Условие: R≈R1 Термокомпенсация – нет
Конфигурирование Настройки/Схема: Полумост Настройки/Метод:Коэф. передачи Тензорез./Статус:Вкл.
Тензорез./Чувствит.: S=4/K
8

Тензорезистор – 2 шт. Условие: R2≈R1 Термокомпенсация – есть
Конфигурирование Настройки/Схема: Полумост Настройки/Метод:Коэф. передачи Тензорез./Статус:Вкл.
Тензорез./Чувствит.: S=4/(2*K)
9
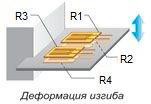
Тензорезистор – 4 шт. Условие: R4≈R3≈R2≈R1 Термокомпенсация – есть
Конфигурирование Настройки/Схема: Мост Настройки/Метод:Коэф. передачи

Тензорез./Статус:Вкл. Тензорез./Чувствит.: S=4/(4*K)
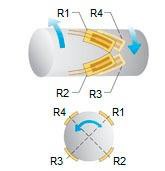
Деформация кручения
10

Тензорезистор – 2 шт. Условие: R2≈R1 Термокомпенсация – есть
Конфигурирование Настройки/Схема: Полумост Настройки/Метод:Коэф. передачи Тензорез./Статус:Вкл.
Тензорез./Чувствит.: S=4/(2*K)

11
Тензорезистор – 4 шт. Условие: R4≈R3≈R2≈R1 Термокомпенсация – есть
Конфигурирование Настройки/Схема: Мост Настройки/Метод:Коэф. передачи Тензорез./Статус:Вкл. Тензорез./Чувствит.: S=4/(4*K)

Приложение Б
Методики измерений с использованием тензорезисторов
Измерение относительной деформации
Деформация контролируемого элемента конструкции приводит к относительному изменению выходного напряжения с тензометрических полумостовых (либо мостовых) схем. Относительное изменение выходного напряжения описывается выражением:
ΔU=e0/U (мВ/В), где
e0 – изменение выходного напряжения тензометрической схемы; U – напряжения питания тензометрической схемы.
Рассчитываемая цифровым датчиком, относительная деформация ε0 (мм/м) связана с регистрируемым значением относительного изменения выходного напряжения тензометрической схемы по формуле:
ε0 = ΔU*Sr, где Sr – расчетный коэффициент чувствительности.
При регистрации относительной деформации цифровыми датчиками серии ZET7x10 или
ZET 7111 в диспетчере устройств во вкладке «Тензорезистор» в поле «Чувствительность (Sr)» необходимо задать значение расчетного коэффициента чувствительности Sr в зависимости от требуемых единиц измерения деформации (см. табл.Б.1).
Примечание: формулы расчета коэффициента чувствительности схемы измерения S (для различных схем измерения) приведены в приложении А.
Табл. Б.1 Значение коэффициента Sr в зависимости от единиц измерения
Единицы измерения деформации
Формулы определения расчетного коэффициента чувствительности Sr для различных единиц измерений
мм/м
Sr=S
мкм/м
Sr=S*1000
м/м
Sr=S/1000
%
Sr=S/10
Измерение напряжения материала
Расчет напряжения возникающего в материале элемента конструкции может производиться в пределах его упругой деформации.
Рассчитываемое цифровым датчиком, напряжение материала элемента конструкции связано с регистрируемой тензорезисторами деформацией по формуле:
σ = ΔU*Sr, где Sr – расчетный коэффициент чувствительности.
При измерении напряжения материала расчетный коэффициент чувствительности Sr
вычисляется по формуле:
Sr=S/1000*E, где
S – чувствительность схемы измерений (см. приложение А);
Е – модуль упругости материала контролируемого элемента конструкции (значения модуля упругости для некоторых материалов приведены в табл. Б.2).
Таблица Б.2 Значения модуля упругости
Материал
Значение модуля упругости Е (МПа)
Алюминий
69000
Медь
100000
Сталь
210000
Стекло
60000
Бетон
20000
При регистрации напряжения материала контролируемого элемента конструкции цифровыми датчиками серии ZET7x10 или ZET 7111, в диспетчере устройств во вкладке
«Тензорезистор» в поле «Чувствительность (Sr)» необходимо задать значение расчетного коэффициента чувствительности Sr.
Измерение крутящего момента
Крутящий момент вызывает деформацию вала, которая регистрируется на его поверхности в виде изменения выходного напряжения с тензометрических полумостовых (мостовых) схем ΔU=e0/U (мВ/В).
Рассчитываемый цифровым датчиком крутящий момент М (Н*м), связан с регистрируемой тензорезисторами деформацией по формуле:
М= ΔU*Sr, где Sr – расчетный коэффициент чувствительности.
При измерении крутящего момента расчетный коэффициент чувствительности Sr
вычисляется по формулам:
-
для сплошных валов:
Sr=S*Е*π*D3/(1000*16*(1+ν))
-
для полых валов:
-
Sr=S*Е*π*D3*(1-d4/D4)/(1000*16*(1+ν)), где
S – чувствительность схемы измерений (см. приложение А);
Е – модуль упругости для материала вала (значения модуля упругости для некоторых материалов приведены в табл. Б.2);
D – диаметр вала;
v – коэффициент Пуассона для материала вала (значения коэффициента для некоторых материалов приведены в табл. Б.3);
d – внутренний диаметр полого вала.
При регистрации крутящего момента цифровыми датчиками серии ZET7x10 или
ZET 7111, в диспетчере устройств во вкладке «Тензорезистор» в поле «Чувствительность (Sr)» необходимо задать значение расчетного коэффициента чувствительности Sr.
Таблица Б.3 Значения коэффициента Пуассона
|
Материал |
Значение коэффициента Пуассона |
|
Алюминий |
0,34 |
|
Медь |
0,35 |
|
Сталь |
0,28 |
Приложение В
Примеры конфигурирования
Конфигурирование цифрового датчика модели ZET 7010 с внешними тензорезисторами. Подключенными по схеме №2 (приложение А) для измерения относительной деформации контролируемого элемента конструкции в единицах измерения - мкм/м
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7010, с подключенными к нему двумя внешними тензорезисторами4 (а также одним внешним резистором, сопротивление которого должно быть эквивалентно сумме сопротивлений тензорезисторов) по схеме №2 (см. приложение А), для работы в режиме измерения относительной деформации.
-
Подключаем тензорезисторы к цифровому датчику согласно графе «Схема подключения» см. приложение А схема №2.
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем
«Полумост».
-
Во вкладке «Настройки» в поле «Метод расчёта» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерении» вносим «мкм/м».
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
Вычисляем расчетное значение чувствительности Sr следующим образом:
-
Из таблицы Б.1 выбираем формулу для требуемых единиц измерения (мкм/м):
Sr=S*1000
-
Формулу для расчета S выбираем из таблицы в приложении А в соответствии с применяемой схемой включения тензорезисторов (для данного примера схема №2):
S=4/(2*K)
-
Подставляем в формулу значение чувствительности тензорезисторов (К), которое приводится в паспорте на тензорезисторы (в данном примере использованы тензорезисторы с значениями чувствительности К=2):
S=4/(2*2)=1
-
Подставляем в формулу для Sr рассчитанное значение S, в результате для данного примера получаем расчетное значение чувствительности:
Sr = 1*1000 = 1000
-
-
Во вкладке «Тензорезистор» в поле «Чувствительность (Sr)» вносим вычисленное расчетное значение чувствительности Sr (для данного примера значение 1000).
-
Во вкладке «Тензорезистор» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Тензорезистор» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7010, оснащенный внешними тензорезисторами подключенными по схеме №2, готов к регистрации относительной деформации в единицах измерения мкм/м.

4 тензорезисторы должны быть установлены (наклеены) на контролируемом элементе конструкции в соответствии с выбранной схемой.
Конфигурирование цифрового датчика модели ZET 7111 с внешними тензорезисторами. Подключенными по схеме №4 (приложение А) для измерения напряженности стального элемента конструкции в единицах измерения - МПа
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7111, с подключенным к нему двумя внешними тензорезисторами5 по схеме №4 (см. приложение А), для работы в режиме измерения напряженности стального элемента конструкции.
-
Подключаем тензорезисторы к цифровому датчику согласно графе «Схема подключения» см. приложение А схема №4.
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем
«Полумост».
-
Во вкладке «Настройки» в поле «Метод расчета» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерений» вносим «МПа»6.
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
Вычисляем расчетное значение чувствительности Sr следующим образом:
-
Формула для расчета Sr приведена в разделе «Измерение напряжения материала» в приложении Б:
Sr=S/10*E
-
Формулу для расчета S выбираем из таблицы в приложении А в соответствии с применяемой схемой включения тензорезисторов (для данного примера схема №4):
S=4/((1+ν)*K)
-
Подставляем в формулу значение коэффициента Пуассона для стали ν=0.28 (см. таблицу Б.3), а также значение чувствительности тензорезисторов (К), которое приводится в паспорте на тензорезисторы (в данном примере использованы тензорезисторы с значениями чувствительности К=2.1):
S=4/(1.28*2.1)=1,49
-
Подставляем в формулу для Sr рассчитанное значение S=1.49, а также значение модуля упругости Е=210000 (см. таблицу Б.2). Обратите внимание на то, что значение модуля упругости необходимо выбирать для того материала из которого изготовлен контролируемый элемент конструкции (в данном примере - сталь). В результате для данного примера получаем расчетное значение чувствительности:
Sr=1.49/10*210000=39900
-
-
Во вкладке «Тензорезистор» в поле «Чувствительность (Sr)» вносим вычисленное расчетное значение чувствительности Sr (для данного примера значение 39900).
-
Во вкладке «Тензорезистор» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Тензорезистор» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7111, оснащенный внешними тензорезисторами подключенными по схеме №4, готов к регистрации напряженности в единицах измерения МПа.

5 тензорезисторы должны быть установлены (наклеены) на контролируемом элементе конструкции в соответствии с выбранной схемой подключения.
6 указанные в данном поле единицы измерения должны строго соответствовать единицам измерения модуля упругости Е используемого при вычисление расчетной чувствительности Sр.
Конфигурирование цифрового датчика модели ZET 7110 с внешними тензорезисторами. Подключенными по схеме №10 (приложение А) для измерения крутящего момента на стальном валу сплошного сечения диаметром 0,02 м в единицах измерения - Н*м
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7110, с подключенным к нему двумя внешними тензорезисторами7 по схеме №10 (см. приложение А), для работы в режиме измерения момента на валу сплошного сечения.
-
Подключаем тензорезисторы к цифровому датчику согласно графе «Схема подключения» см. приложение А схема №10.
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем
«Полумост».
-
Во вкладке «Настройки» в поле «Метод расчета» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерений» вносим «Н*м»8.
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
Вычисляем расчетное значение чувствительности Sr следующим образом:
-
выбираем формулу для расчета Sr для вала сплошного сечения (приведена в разделе
«Измерение крутящего момента» Приложения Б):
Sr=S*Е*π*D3/(1000*16*(1+ν))
-
Формулу для расчета S выбираем из таблицы в приложении А в соответствии с применяемой схемой включения тензорезисторов (для данного примера схема №10):
S=4/((2*K)
-
Подставляем в формулу значение чувствительности тензорезисторов К, взятое из паспорта на партию тензорезисторов (в данном примере использованы тензорезисторы с значениями чувствительности К=1.9):
S=4/(2*1.9)=1,05
-
Подставляем в формулу для вычисления Sr рассчитанное значение S=1.05, значение модуля упругости для материала вала Е=210*109Па (см. таблицу Б.2), значение диаметра вала D=0.02 м, а также значение коэффициента Пуассона для стали ν=0.28 (см. таблицу Б.3). В результате для данного примера получаем расчетное значение чувствительности:
Sr=1.05*210*109*3.14*8*10-6/(1000*16*1.28)=270.46
-
-
Во вкладке «Тензорезистор» в поле «Чувствительность (Sr)» вносим вычисленное расчетное значение чувствительности Sr (для данного примера значение 270.46).
-
Во вкладке «Тензорезистор» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Тензорезистор» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7110, оснащенный внешними тензорезисторами подключенными по схеме №10, готов к регистрации крутящего момента в единицах измерения Н*м.

7 тензорезисторы должны быть установлены (наклеены) на поверхность вала под углом 45° к его оси.
8 указанные в данном поле единицы измерения должны строго соответствовать единицам измерения параметров, используемых при вычисление расчетной чувствительности Sр (Пример: для измерения момента в Н*м, единицы измерения параметров: модуль упругости – Па; диаметр вала - м).
Конфигурирование цифрового датчика модели ZET 7111 для работы с внешним тензодатчиком модели MK2 (изготовитель Тензо-М), рассчитанным на нагрузку до 1000кг и подключенным по четырехпроводной мостовой схеме, для измерения веса в единицах измерения - кг
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7111, с подключенным к нему внешним тензодатчиком модели МК2.
-
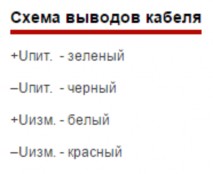
Подключаем при помощи кабеля тензодатчик МК2 к цифровому датчику ZET 7111 по четырехпроводной мостовой схеме, для этого соединяем цепи: «Питание +» с «+Uпит.»,
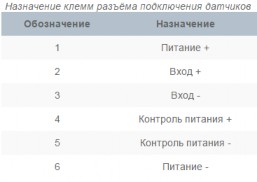
«Питание-» с «-Uпит.», «Вход +» с «+Uизм.» и «Вход –» с «-Uизм.» (назначение контактов (клемм) разъема для цифрового датчика модели ZET 7110 приведено в табл.В.1, а соответствие назначения цепей для тензодатчика MK2 цветовой маркировке цепей в его кабеле приведена в табл. В.2.
Таблица В.1 Назначение контактов ZET 7110 Таблица В.2 Назначение цепей МК2
-
В разъеме, со стороны подключения цифрового датчика ZET 7111, соединяем цепь
«Питание +» с цепью «Контроль питания +», а также цепь «Питание -» с цепью «Контроль питания -».
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем «Мост».
-
Во вкладке «Настройки» в поле «Метод расчета» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерений» вносим значение «кг».
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
Во вкладке «Датчик» в поле «Верхний предел измерений (в ед. изм.)» вносим значение 1000
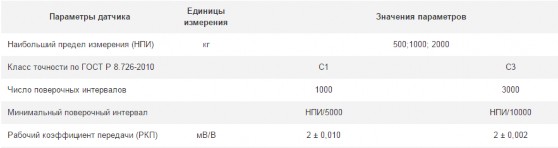
- величина максимальной измеряемой нагрузки на которую рассчитан тензодатчик (см. Таблицу В.3, параметр «Наибольший предел измерений(НПИ)»).
-
Во вкладке «Датчик» в поле «Чувствительность (Sd)» вносим значение «2» (см. Таблицу В.3, параметр «Рабочий коэффициент передачи(РКП)»).
Таблица В.3 Характеристики тензодатчика МК2
-
Во вкладке «Датчик» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Датчик» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7111, с подключенным к нему тензодатчиком модели МК2, готов к измерению веса (единицы измерения кг).
Конфигурирование цифрового датчика модели ZET 7010 для работы с внешним тензодатчиком модели S2M (изготовитель HBM), рассчитанным на измерение номинальных усилий до 100Н и подключенным по шестипроводной мостовой схеме, для измерения действующих на него сил растяжения/сжатия в единицах измерения - Н
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7010, с подключенным к нему внешним тензодатчиком модели S2М.
-
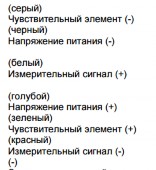
Подключаем при помощи кабеля тензодатчик S2M HBM к цифровому датчику ZET 7010 по шестипроводной мостовой схеме, для этого соединяем цепи: «Питание +» с
«Напряжение питания (+)», «Питание-» с «Напряжение питания (-)», «Вход +» с
«Измерительный сигнал (+)», «Вход –» с «Измерительный сигнал (-)», «Контроль питания
+» с «Чувствительный элемент (+)» и «Контроль питания -» с «Чувствительный элемент (-
)» (назначение контактов (клемм) разъема для цифрового датчика модели ZET 7010 приведено в табл.В.1, а соответствие назначения цепей для тензодатчика S2M цветовой маркировке цепей в его кабеле приведена в табл. В.4).
Таблица В.4 Назначение цепей тензодатчика S2M
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем «Мост».
-
Во вкладке «Настройки» в поле «Метод расчета» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерений» вносим значение «Н».
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
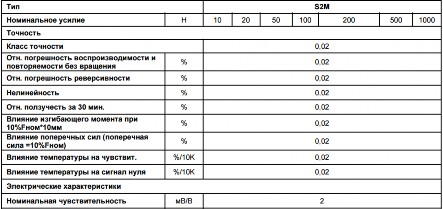
Во вкладке «Датчик» в поле «Верхний предел измерений (в ед. изм.)» вносим значение 100
- величина максимальной измеряемой нагрузки, на которую рассчитан тензодатчик (см. Таблицу В.5, параметр «Номинальное усилие»).
-
Во вкладке «Датчик» в поле «Чувствительность (Sd)» вносим значение «2» (см. Таблицу В.5, параметр «Номинальная чувствительность»).
Таблица В.5 Характеристики тензодатчика S2M
-
Во вкладке «Датчик» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Датчик» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7010 с подключенным к нему тензодатчиком модели S2M готов к измерению сил растяжения/сжатия (единицы измерения Н).
Конфигурирование цифрового датчика модели ZET 7110 для работы с внешним тензодатчиком модели KDE-1MPA, рассчитанным на работу в диапазоне измерения давления до 1 МПа и подключенным по четырехпроводной мостовой схеме, для измерения давления в единицах измерения - МПа
В данном примере приводится последовательность конфигурирования цифрового датчика модели ZET 7110 с подключенным к нему внешним тензодатчиком модели KDE-1MPA.
-
Подключаем при помощи кабеля тензодатчик KDE-1MPA к цифровому датчику ZET 7110 по четырехпроводной мостовой схеме. Для этого соединяем цепи: «Питание +» с «Вход (+)», «Питание-» с «Вход (-)», «Вход +» с «Выход (+)» и «Вход –» с «Выход (-)», (назначение контактов (клемм) разъема для цифрового датчика модели ZET 7110 приведено в табл.В.1, а соответствие назначения цепей для тензодатчика KDE-1MPA цветовой маркировке цепей в его кабеле приведена в табл. В.6).
Таблица В.6 Назначение цепей тензодатчика KDE-1MPA

-
В разъеме со стороны подключения цифрового датчика ZET 7110 соединяем цепь
«Питание +» с цепью «Контроль питания +», а также цепь «Питание -» с цепью
«Контроль питания -».
-
В диспетчере устройств открываем «Свойства» настраиваемого цифрового датчика.
-
Во вкладке «Настройки» в поле «Схема подключения тензорезисторов» выбираем
«Мост».
-
Во вкладке «Настройки» в поле «Метод расчета» выбираем «Коэффициент передачи».
-
Во вкладке «Настройки» в поле «Единица измерений» вносим значение «МПа».
-
Во вкладке «Настройки» активируем кнопку «Сохранить».
-
Во вкладке «Датчик» в поле «Верхний предел измерений (в ед. изм.)» вносим значение
«1» - величина максимальной измеряемой нагрузки на которую рассчитан тензодатчик KDE-1MPA.
-
Во вкладке «Датчик» в поле «Чувствительность (Sd)» вносим значение «0,47», приведенное в формуляре на тензодатчик KDE-1MPA, (для данного примера значение чувствительности 470 мкВ/В, обратите внимание что в поле «Чувствительность (Sd)» вводится значение, пересчитанное в единицы измерения мВ/В).
-
Во вкладке «Датчик» в поле «Статус активности» выбираем значение «вкл».
-
Во вкладке «Датчик» активируем кнопку «Сохранить».
-
Цифровой датчик модели ZET 7110, с подключенным к нему тензодатчиком модели KDE-1MPA, готов к измерению давления (единицы измерения МПа).
/////////////////////////////////