Content .. 1481 1482 1483 1484 ..
Jeep Liberty KJ. Manual - part 1483
INSTALLATION
WARNING: To avoid personal injury or death, on vehicles equipped with airbags, disable the supplemental
restraint system before attempting any steering wheel, steering column, airbag, occupant classification sys-
tem, seat belt tensioner, impact sensor, or instrument panel component diagnosis or service. Disconnect
and isolate the battery negative (ground) cable, then wait two minutes for the system capacitor to discharge
before performing further diagnosis or service. This is the only sure way to disable the supplemental
restraint system. Failure to take the proper precautions could result in accidental airbag deployment.
NOTE: Before replacing a Body Control Module (BCM), use a diagnostic scan tool to retrieve the current
settings for the many BCM programmable features including electronic pinion factor (tire size), cabin equal-
ization curve (audio system architecture), country code and Remote Keyless Entry (RKE) system prefer-
ences. These settings MUST be programmed into the replacement BCM using the diagnostic scan tool
before returning the vehicle to service. A new BCM is shipped in default mode that may prevent proper
speedometer indications and the availability of numerous electronic features until it has been properly pro-
grammed. Refer to the appropriate diagnostic information.
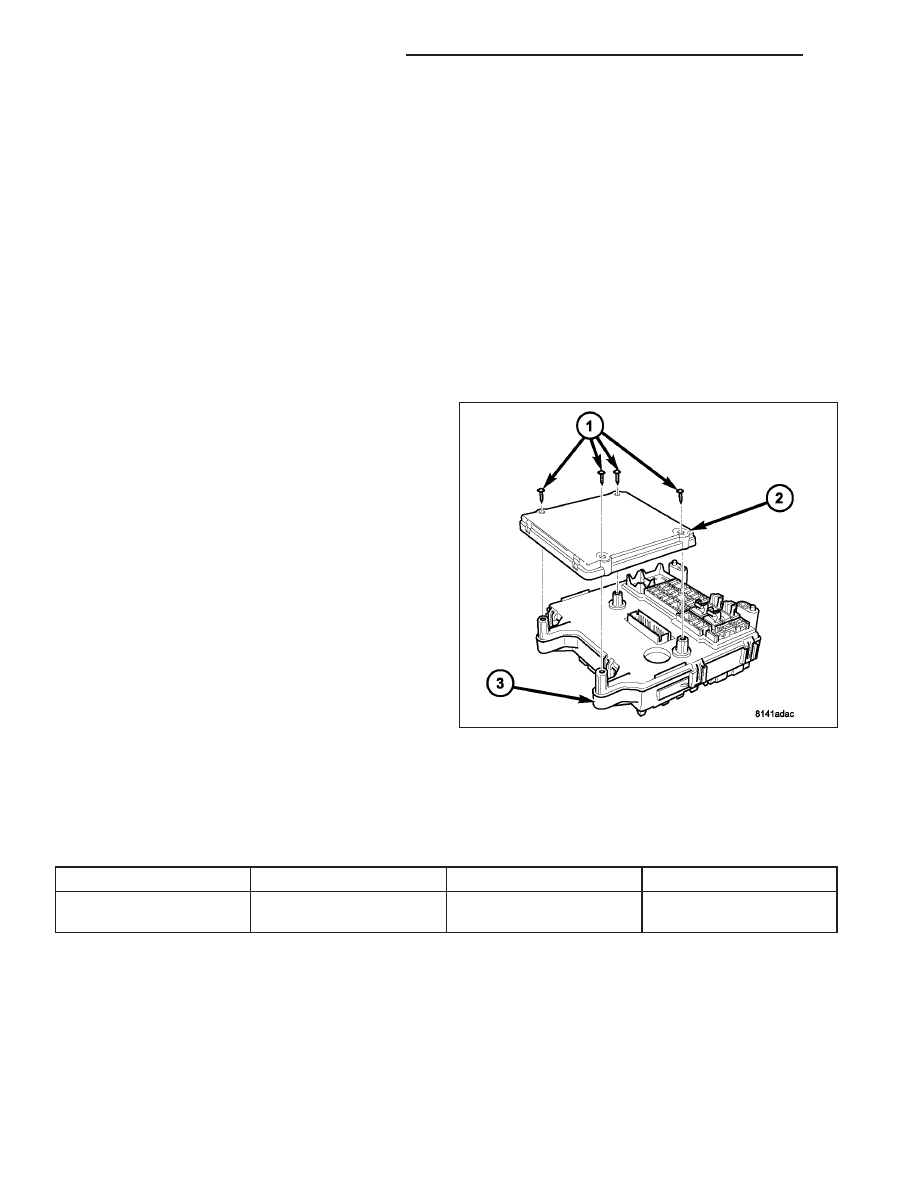
1. Position the Body Control Module (BCM) (2) to the
Junction Block (JB) (3) and reconnect them at the
JB/BCM interface connector.
2. Install and tighten the four screws (1) that secure
the BCM to the JB. Tighten the screws to 2 N·m
(20 in. lbs.).
3. Reinstall the Junction Block Module (JBM) onto the
instrument panel end bracket. (Refer to 8 - ELEC-
TRICAL/POWER
DISTRIBUTION/JUNCTION
BLOCK - INSTALLATION).
4. Reconnect the battery negative cable.
SPECIFICATIONS
BODY CONTROL MODULE
TORQUE SPECIFICATIONS
DESCRIPTION
N·m
Ft. Lbs.
In. Lbs.
Body Control Module
Mounting Screws
2
-
20
8E - 144
ELECTRONIC CONTROL MODULES
KJ