Infiniti M35/M45 Y50. Manual - part 898
ACTIVE AFS
LT-137
C
D
E
F
G
H
I
J
L
M
A
B
LT
AFS OPERATION
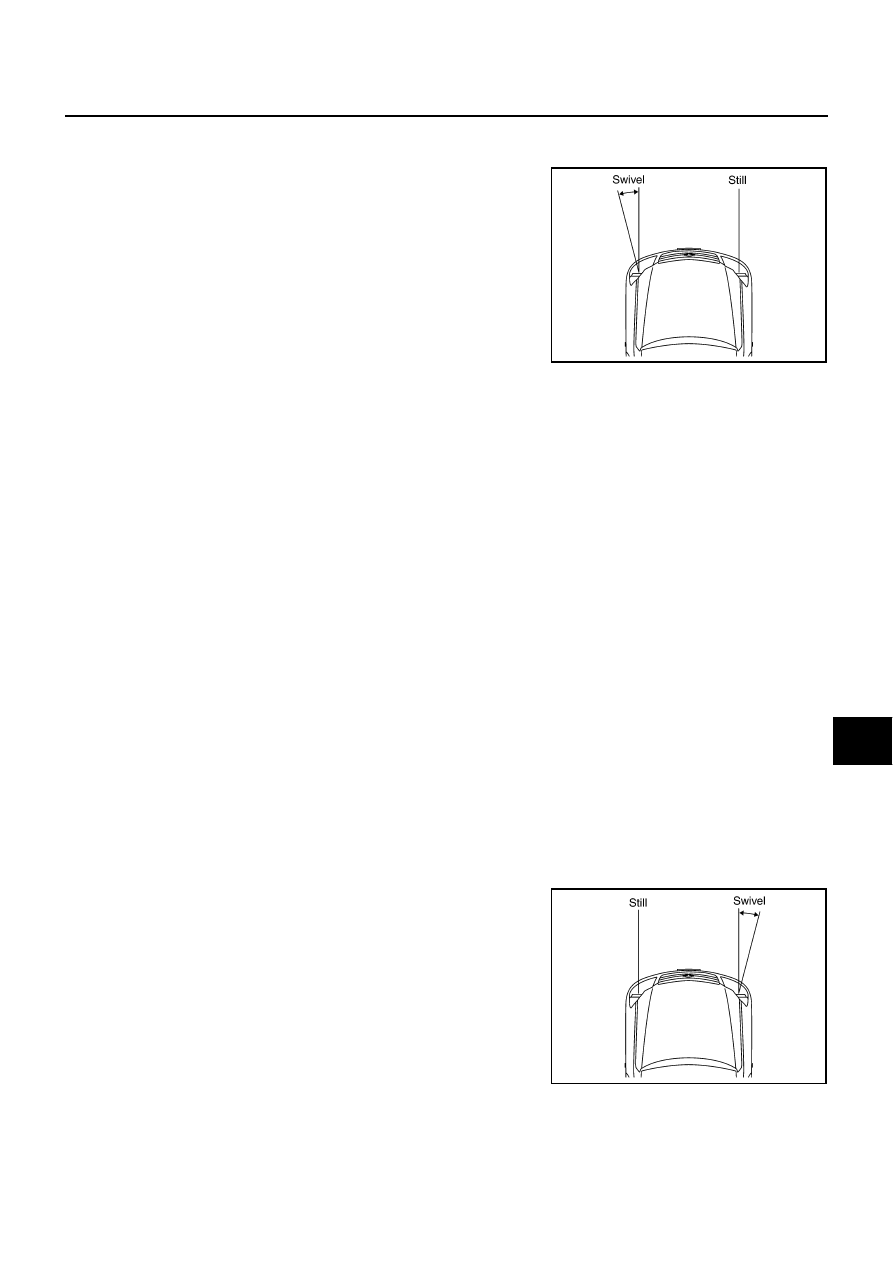
When The Steering Wheel Is Turned To The Left
Swivel motor driving signal (1-phase) is transmitted when the steer-
ing wheel is turned to left approximately more than 10* degrees
(predetermined), with vehicle speed at approximately 25 km/h (15.5
MPH) or more, headlamps (HIGH/LOW) illuminated, AFS switch ON
and the engine running and the A/T select lever in any position
except range P or R.
* : Slightly different from the case when it is turned to the right.
Swivel motor driving signal (1-phase) is sent
●
to front combination lamp LH terminal 17
●
through AFS control unit terminal 15,
●
to AFS control unit terminal 38
●
through front combination lamp LH terminal 21.
And swivel motor driving signal (2-phase) is sent:
●
to front combination lamp LH terminal 16
●
through AFS control unit terminal 17,
●
to AFS control unit terminal 36
●
through front combination lamp LH terminal 20.
Swivel position sensor detects swivel angle during ignition switch ON, and transmits swivel position sensor
signals to the AFS control unit:
When ignition switch is turn to ON position, power is supplied
●
to front combination lamp LH terminal 15
●
through AFS control unit terminal 24.
When ignition switch is turn to ON position, swivel position sensor signal input is supplied
●
to AFS control unit terminal 29
●
through front combination lamp LH terminal 14.
Ground is supplied
●
to front combination lamp LH terminal 19
●
through AFS control unit terminal 27.
The low beam headlamp LH starts to swivel to the left.
The swivel motor driving signals are blocked and the swivel motion stops when the steering angle reaches
approximately more than 80 degrees (predetermined). The low beam headlamp will not swivel any further no
matter how further left. As the steering wheel is turned back to the right, the swivel motor driving signals (both
1-phase and 2-phase) will be reversed, causing low beam headlamp LH to start swiveling to the right. When
steering angle becomes smaller than predetermined value, the low beam headlamp is set in the straight-
ahead position, swivel motor driving signals are blocked and low beam headlamps stop swiveling.
When The Steering Wheel Is Turned To The Right
Swivel motor driving signal (1-phase) is transmitted when the steer-
ing wheel is turned to right approximately more than 10* degrees
(predetermined), with headlamps (HIGH/LOW) illuminated, AFS
switch ON, the engine running and the A/T select lever in any posi-
tion except range P or R.
* : Slightly different from the case when it is turned to the left.
Swivel motor driving signal (1-phase) is sent
●
to front combination lamp RH terminal 16
●
through AFS control unit terminal 34,
●
to AFS control unit terminal 11
●
through front combination lamp RH terminal 20.
And swivel motor driving signal (2-phase) is sent
●
to front combination lamp RH terminal 17
●
through AFS control unit terminal 32,
●
to AFS control unit terminal 13
SKIB4705E
SKIB4706E